


Mobula6HDのファームをアップしてみた・・・というキロク


ウチのMobula6HDはベータフライトのファームのバージョンが3.5.7のままなんだけど、Betaflight Configuratorは10.7.0と最新。ネットで見ると、3.5.7には10.4を使え!みたいになってるけど、特に問題なく設定できるようなので、そのまま使っている。バージョン違いを同居させるにはノウハウがあるらしい。
でも、そのせいなのか、バッテリーを繋いでも、画像が来ないことがたまにある。(プロペラは動くけど、画像が映らない)
何度かSDカードを抜き差しすると直るが、先日は飛んでる最中に突然映らなくなった!めっちゃ困る。
本体が壊れた可能性もある(まだ数える程しか飛ばしてない)けど、Betaflightに繋ぐ時に映らないことは無いし・・・


で、よく分からないまま、
Mobula6HDのファームをアップデートしてみることにした。
新しい方がいいんじゃないかと(^^;)


バックアップは取ってあるので、いきなりアップデートに進もう!
機体をPCに繋ぐ時間が長くなるので、扇風機で機体を冷やします!必須と思います
現在のファームウェアのバージョンは以下の通り。
# version
# Betaflight / CRAZYBEEF4FR (C4FR) 3.5.7 Mar 15 2019 / 21:42:20 (e9130527c) MSP API: 1.40
DFUモードにする方法がわからない(^^;) ので、見習い魔法使いキヨっちcalmzeroさんの情報を参考にして、ImpulseRC Driver Fixer というのをダウンロードします。HPはここ。

ダウンロードしたファイルを起動すると、

いきなりこんなのが出たので、慌ててMobula6HDをPCと繋ぎました。するとDFUのドライバーがインストールされ、しばらくすると完了と共に変なメッセージが!

クロームはドライバーを修正しながら実行した。
ConfiguratorがFCを検知する前にクロームを閉じろ。
PCの再起動を推奨する。
みたいな内容。
素直に、ソフトを全部閉じて、PCを再起動し、最初からやり直します。
PCが立ち上がったら、まず、Mobula6HDをPCにつないでから、ImpulseRCを起動します。今度はエラーが出ずに完了!その後、機体をPCに繋いだままBetaflight Configuratorを起動して、立ち上がった後、10秒位待っていると、


と、DFUに変わりました!!

ファームフラッシャーをクリックすると、


こんな感じです。再起動シーケンスなし、チップメモリ完全消去を入れました(完全に受け売り)。
ファームウェアを選択(Online)を押すと、


こうなりました。 あとは、 ファームウェアの更新 を押すだけ・・・緊張しつつポチッと!
メモリ消去して、書き込み・・・


上手く行ったようです!!
自動的にDFUモードは解除され、

通常に戻っています。良く出来てる。UpdateFirmwareを切り、となりの接続を押すと、

こんなのが出ました! 適用するしかないので、適用を押して、接続を押します。すると更に・・・

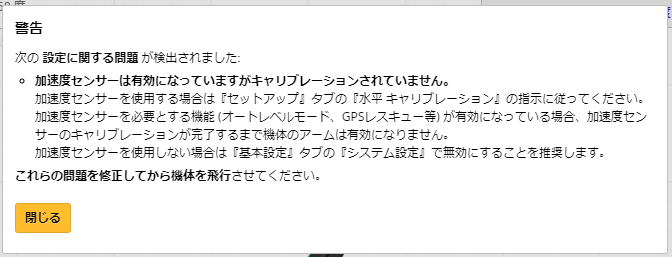
加速度センサーのキャリブレーションが必要との警告。そりゃそうだろう。


水平キャリブレーションを実施しました。今更ながらファームは4.2.2になってる!!
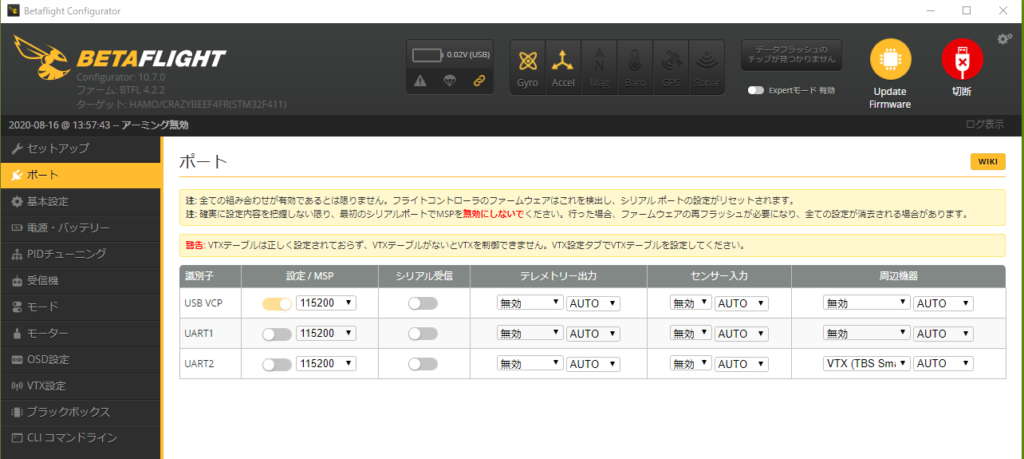
さて、調整は全部やり直しのはず・・・まずは、ポートから。
早速、VTXが設定されていない・・・以前のようにUART2に設定したら、警告出ました!
”VTXタブでVTXテーブルを設定してください”・・・
なるほど、いつの間にかメニューにVTX設定というのがある!

VTX設定に移り、

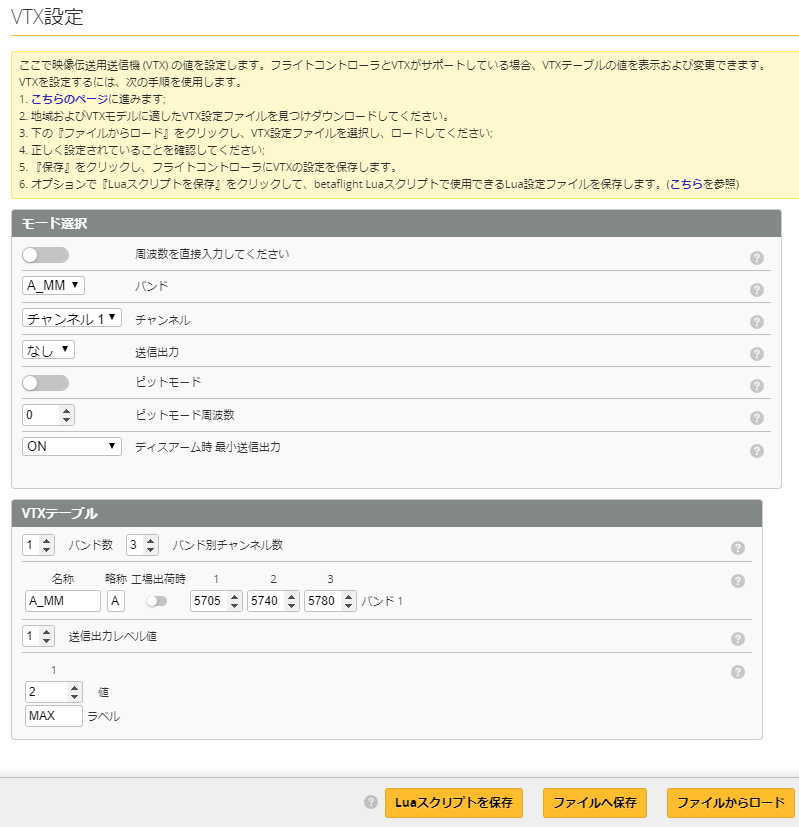
こうしてみました。モードって何かわからず、drone4ブログさんを参考にさせて頂きましたm(_ _)m
でもエキスパートモードなので、全部はマネできず・・・
送信出力レベルの下の 2 や MAX は、
RTC6705(USA)を参考にしました。

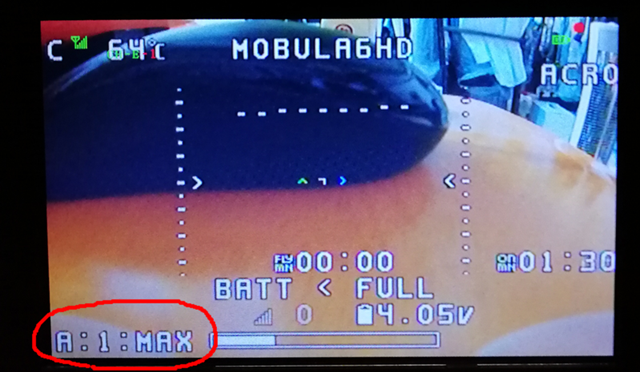
紛らわしいですが、略号A-5705は1個目-出力MAX になっているようです!
Mobula6HDのVTXは25mAですが(^^;)
続いて 基本設定。これまた全然変わってる!

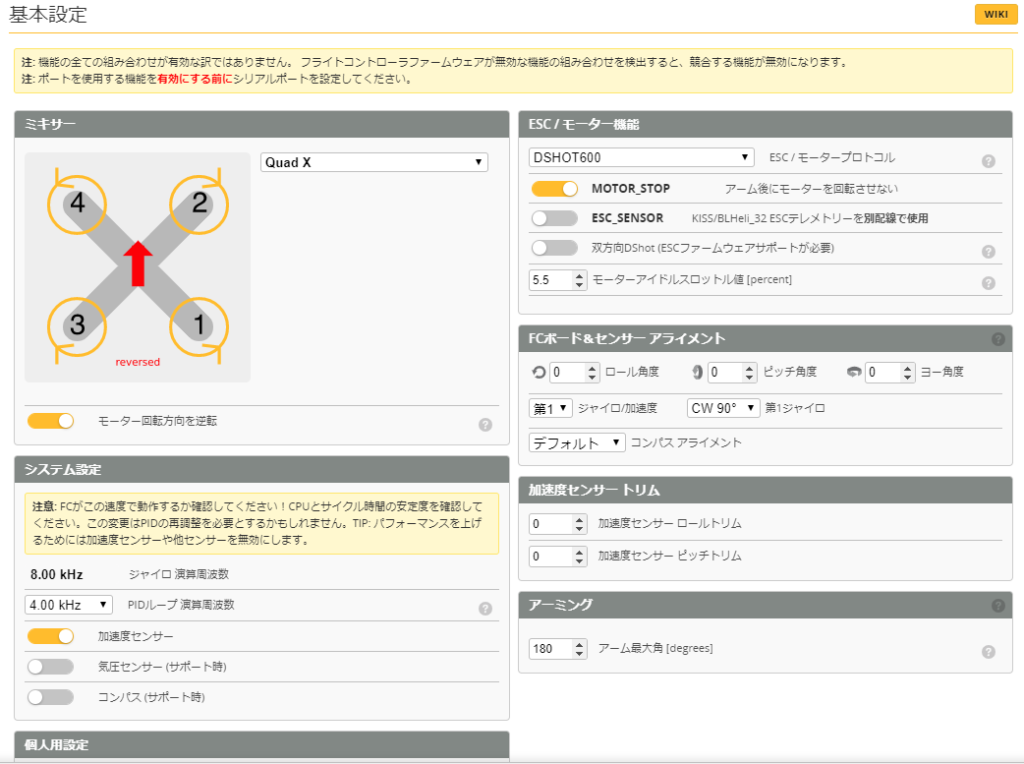
モータの逆回転から直します。気圧センサーとコンパスを消し、Motor_stopをONにして、双方向はOFFのままです。(ONにすると、それに関する定義もしないと動きません。とりあえずOFFで)
アーミングは180度にします。(良かれと思って、CW90°を”デフォルト”にしたら、機体がひっくり返るようになりました)


機体名入れて、カメラ角度入れて、


AIRMODE常時を切り、あとはこんな感じで以前に合わせます。保存して再起動を押します。
次は 電源。

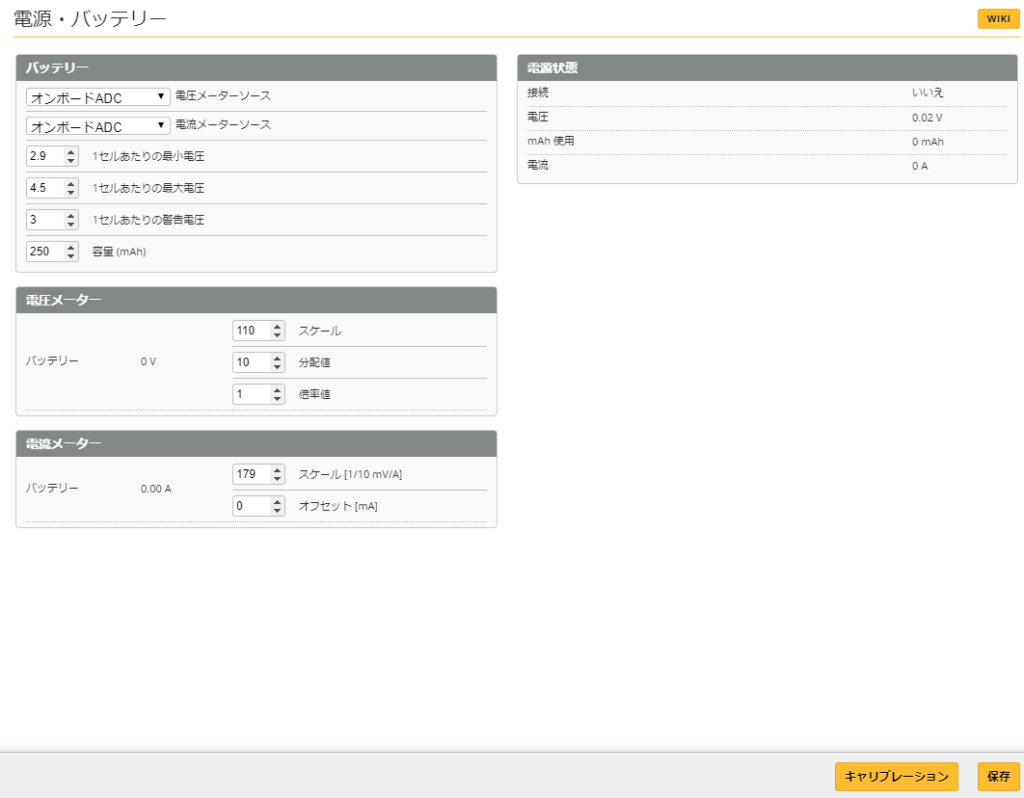
電圧設定をちょっと変えました。電流メータのスケールは、以前は1175で今は179・・・分かりません。
キャリブレーションはとりあえずしません。これで保存します。
PIDチューニングです。
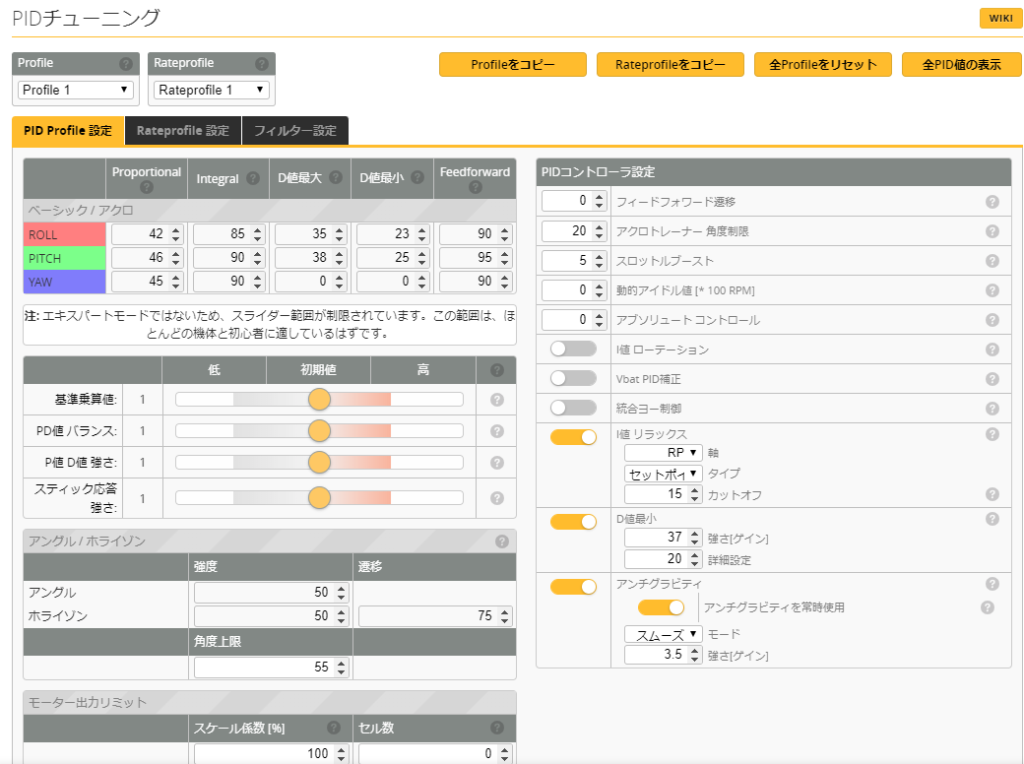
上が初期画面。どうすりゃいいの?・・・しばらく見てたら少しわかってきて、

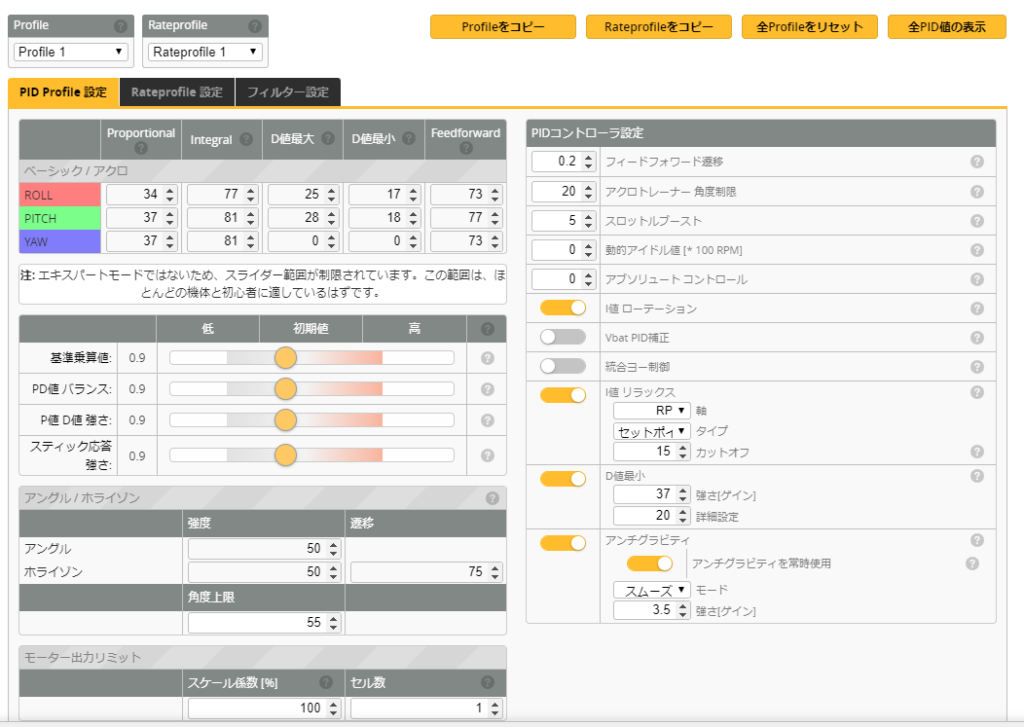
自動で設定してくれるようなので、とりあえず、少し落としてビギナー向けみたいな設定にスライドバーを動かしました。フィードフォワードも変更したかな。

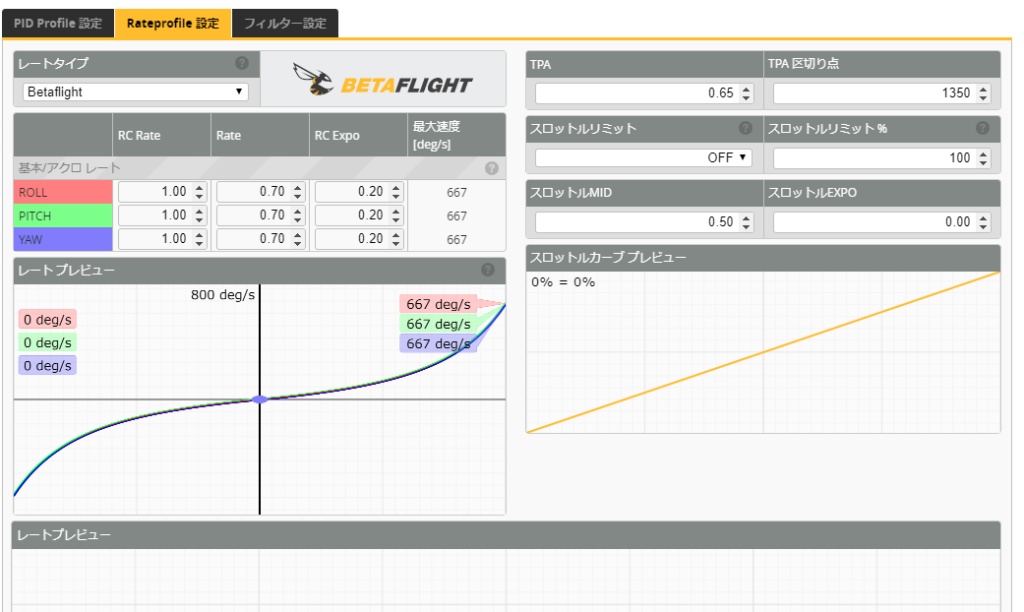
Pateprofileは RCexpoだけ 0→0.2 にしてみました。


フィルターはデフォルトのまま。
続いて 受信機

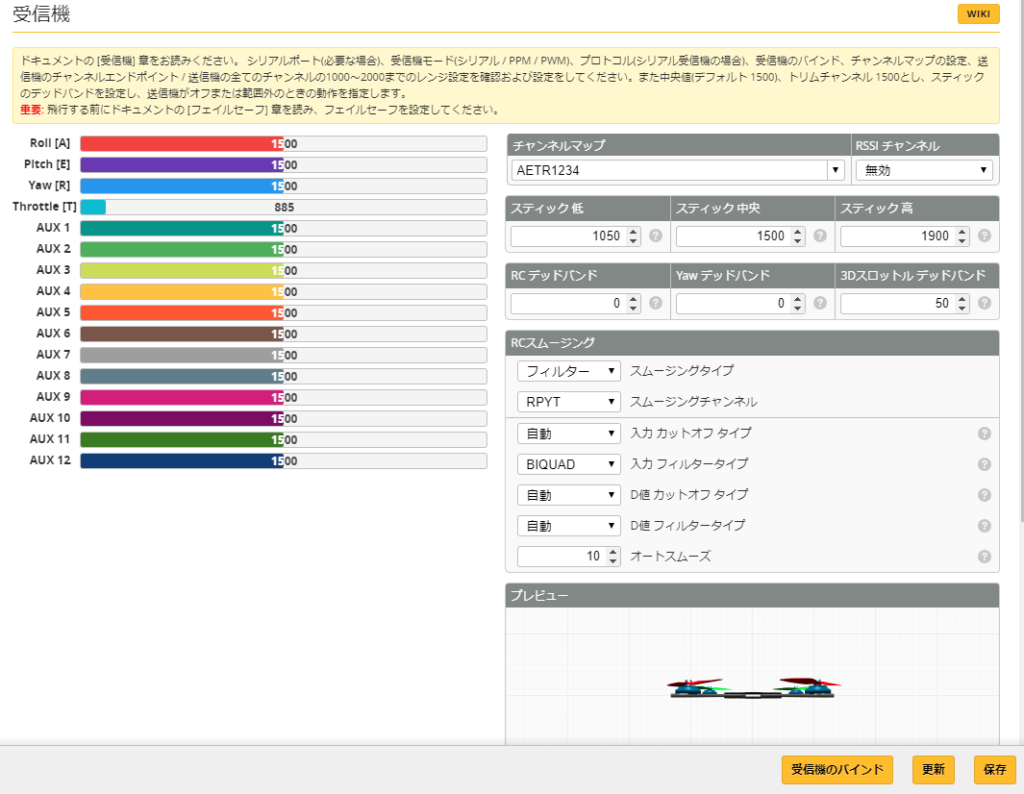
こうなってました。
プロポをPCにつないでも 画面上で全く反応しない・・・そうか、ファームを変えたから、プロポと機体のバインドをやり直さんといかんのか!プロポのMobula6HDのファイルの中からBindを押したらできました。
そのままPCと繋ぐと、反応しました。反転とかも問題ないようなので、そのまま保存。
次は、モード。何も入ってません。

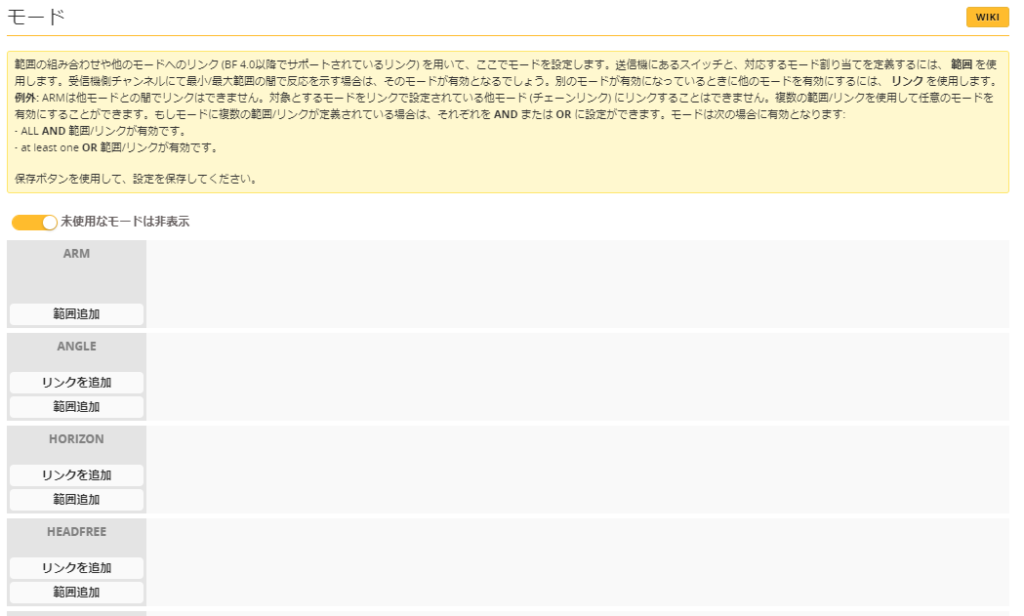
これは、これまで通り、

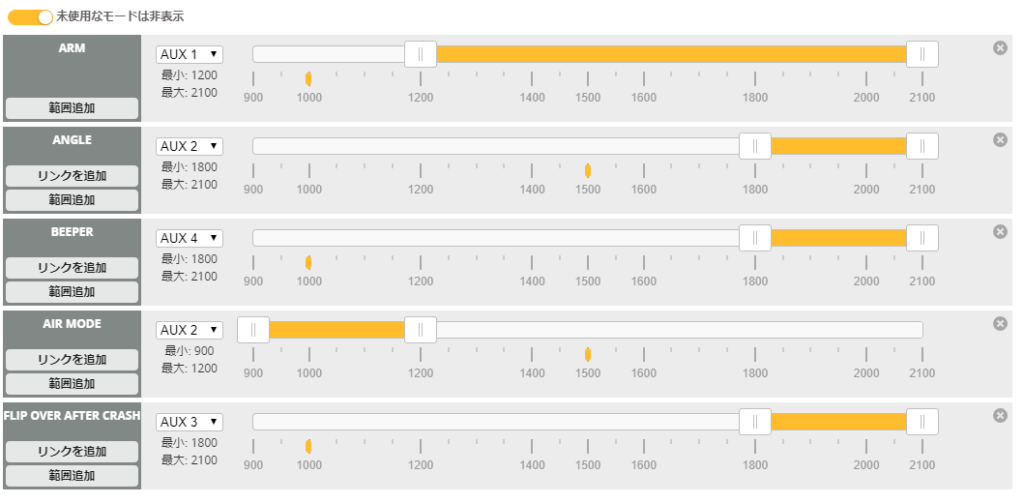
こうして、保存。
モータは何もせず、OSDへ。これまた何も入ってないので、

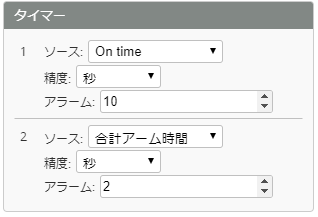
タイマー2のアラームを2分にして、表示は、

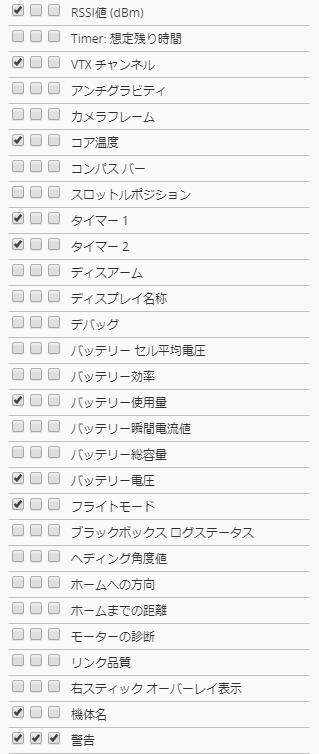

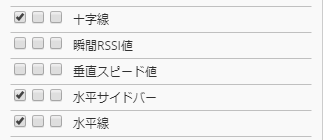


とりあえず、並べてみた。保存してひとまず終了!
最後にバックアップを取ります。CLIコマンドライン で diff all と入れてリターン。
ファイルへ保存を押して、保存します。
とりあえず、この設定でアングルモードで飛ぶことを確認しました!(1分程だけど)
以前の設定よりのんびりした感じかな・・・
夜になったので、ちゃんとは飛ばせてない。
結構時間かかったけど、良くなったかな(^^;)
画像が出ない不具合が無くなることを期待してます!
■■■ 翌日、外で少し飛ばした感じでは、以前の不具合は出てません! ■■■
***その後 4.2.4 にUPしました!が・・・***

いまいちなんだなぁ。
マイクロドローン入門:BetaFlight Configrator インストール
Jumper T8SG V2(V3) PLUS キター! 早速ハマる!!
マイクロドローン開局申請! 詳細その2(JARD)→届いた!