







Happymodel Cine8 購入!→色々あるー
が、相変わらずの安物買いのトホホ道だった、という・・・

3Sの85㎜フープ機。バッテリーはLarva X HDと同じ450mAhが1個付属。14,144円でした。
最初は65㎜だったから少しずつ大きくなるねぇ😅
ちょっと問題なのは、 のようにバラ状態で届くので自分で組み立てる。DIY方式。ハンダ付け不要でカンタンそうだったので、買ってみたけど、初心者には十分に大変でした。Youtubeが無ければ無理だった。その分、安いんでしょう。
のようにバラ状態で届くので自分で組み立てる。DIY方式。ハンダ付け不要でカンタンそうだったので、買ってみたけど、初心者には十分に大変でした。Youtubeが無ければ無理だった。その分、安いんでしょう。
スペックは、
ブランド名:Happymodel
モデル:Cine8
商品名:DIY 85mm F43SブラシレスCineWhoopFPVレーシングドローンBNF
ホイールベース:85mm
サイズ:145x140x23mm
重量:73g(バッテリーなし)
重量:99g(Insta360を使用、パッケージには含まれていません)
|
EX1202.58000KVモーター |
モデル:EX1202.5 |
| Gemfan D51 20204ブレードプロペラ |
素材:PC |
|
CRAZYBEE F4V3.1フライトコントローラー |
Frsky SPI RXバージョン)CRAZYBEEF4 V3.1 FCファームウェアターゲット:MATEKF411RX |
| オンボード12A 4in1 ESC |
MCUがEFM8BB21にアップグレードされました バースト電流:15A(5秒) |
|
オンボードFrskySPID8レシーバーバージョン |
CC2500ハードウェア |
|
外部FlyskyFli14 +レシーバー |
チャンネル:14 |
|
外部DSMX / 2レシーバー |
寸法:20×12.4x5mm |
|
外部TBSCRSFNanoレシーバー |
オリジナルのTBSCROSSFIREレシーバー、CRSFプロトコル、公式TBSトランスミッター互換 |
|
5.8G 40CH 400mw VTX |
出力電力:25mw〜400mw切り替え可能 |
|
Caddx ANT1200TVLカメラ |
イメージセンサー:1/3 “CMOSセンサー |
| リポバッテリー | Tattu 3S 11.4V 450mAhLipoバッテリー |
 1箱で届きます。(左は自前の工具類)ドライバーとレンチが1個ずつ入ってますが、足りません。サイズの違う+ドライバーにカッター、ピンセット、ハサミ等が必要です。
1箱で届きます。(左は自前の工具類)ドライバーとレンチが1個ずつ入ってますが、足りません。サイズの違う+ドライバーにカッター、ピンセット、ハサミ等が必要です。 小袋がいっぱいあってビックリ!不足はありませんでした。さすがHappymodel。
小袋がいっぱいあってビックリ!不足はありませんでした。さすがHappymodel。
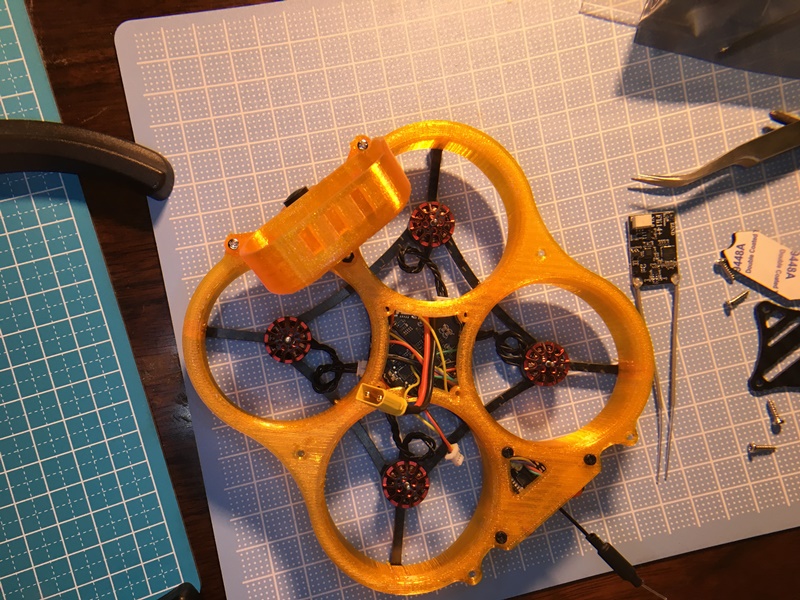
 まず、FC周りから組立開始。ネジ止めするだけ。
まず、FC周りから組立開始。ネジ止めするだけ。
ポイントはモータの取付位置と、FCの取付方向です。多分これでいいと思います。動いたので。
私のはFlysky版なので、FCとは別にRXが付属しています。取り付けてみましたが、邪魔なので、とりあえず今回は使わないことにして後で外しました。どこに付けるかオイオイ考えます。(内蔵RXではショボ過ぎるので付けるしかないようです)
 フレーム取付ました。RXを取り付けるコネクタも出してますが、取り付けません。
フレーム取付ました。RXを取り付けるコネクタも出してますが、取り付けません。 RXのコネクタはココから出せました!(反対の穴は微妙に出せなかった)
RXのコネクタはココから出せました!(反対の穴は微妙に出せなかった)
将来使えそう。外部RXは取り付けるトコが見当たらないので外に出すしか無さそうです。
今回はFC内蔵のFrskyで行くことにします。 プロペラは2種類2セット分です。今回は外側へ回る(逆回転)らしいです。
プロペラは2種類2セット分です。今回は外側へ回る(逆回転)らしいです。 大体できたので、外側のクッションをとりあえず嵌めて(接着はまだ)、PCに接続してみました。
大体できたので、外側のクッションをとりあえず嵌めて(接着はまだ)、PCに接続してみました。
羽根の間にUSBポートがあり、中継のコネクタが付属しています。プロペラを取り付けても付けることできますが、この時は回転方向が合っているかわからなかったので2個だけ付けました。
そしてここから 混乱の第2ステージ!!
Betaflight Configuratorに接続したけど・・・なんか変! 見たことないターゲット!
見たことないターゲット!
バージョンを確認したら、 STM32F4・・・な、なんですか???
STM32F4・・・な、なんですか???
Youtubeを検索すると、HAJI VLOGSさんの動画を発見!
一緒だー!助かりましたー!!ありがとうございます♪
後でBanggoodを確認したら、確かに、 MATEKF411RX・・・とあるので、なんかわからんけどその通り・・・
MATEKF411RX・・・とあるので、なんかわからんけどその通り・・・
HAJI VLOGSさんの動画が無かったら、どうなっていたのか😱
ファームをバージョンアップします。4.2.9にしました。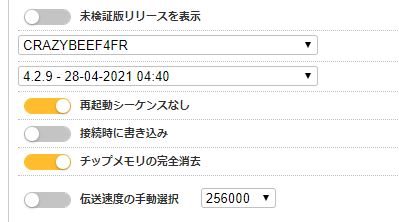
ベータフライトに戻って、
ポートは、
UART2にVTXを設定しました。(UART1ではダメだった)
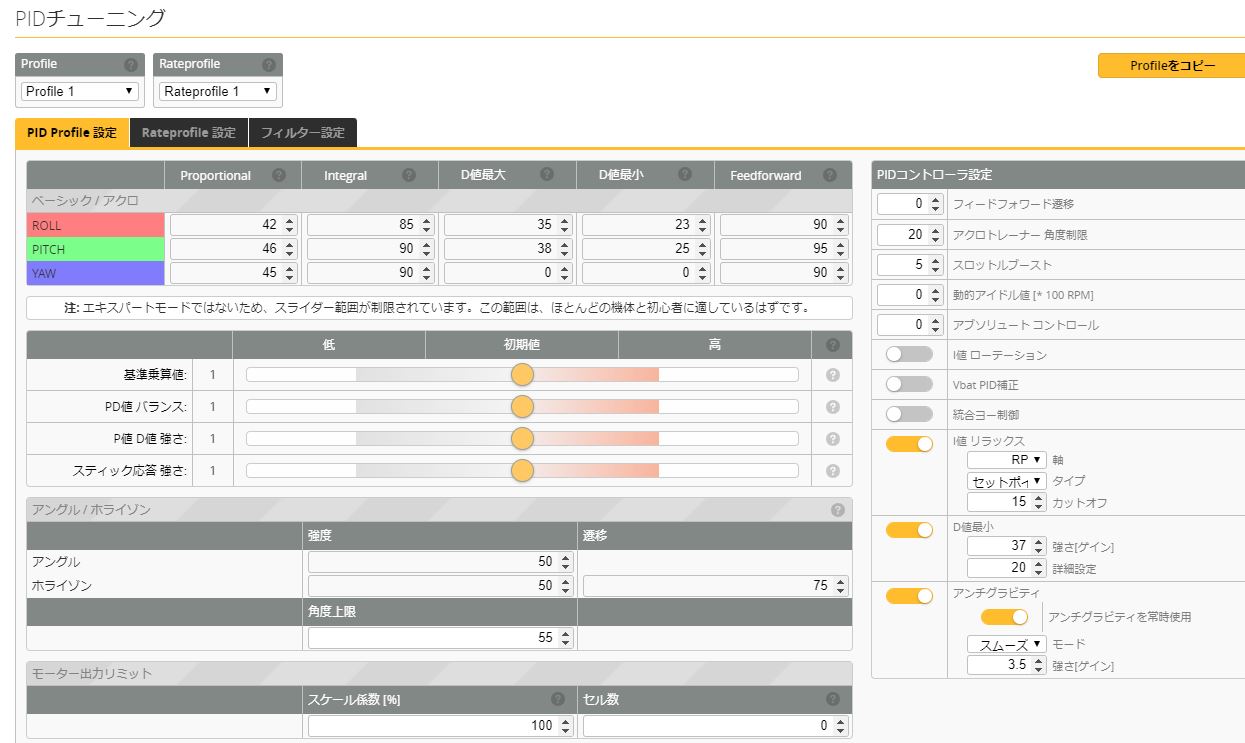
基本設定は、
このようにしました。モーター逆回転、アーミング180度です。
気圧センサーとコンパスはOFFです。(ONだとキャリブレーションエラーが消えませんでした)
ヨー角度は180度です。(HAJI VLOGSさんの教え通りです😉)

上記の RX_LOST と RX_SET は後でONにしました。ブザーを鳴らす為です。

バッテリーはこんな感じ。取説に、電流メーターの数値が書いてあったので、わからないまま470を入れました😅
PIDはデフォルトのままで触らず。
受信機は Jumper T8SG Plus(V3)を使います。いつもと同じAETR。
モードもいつもと同じ。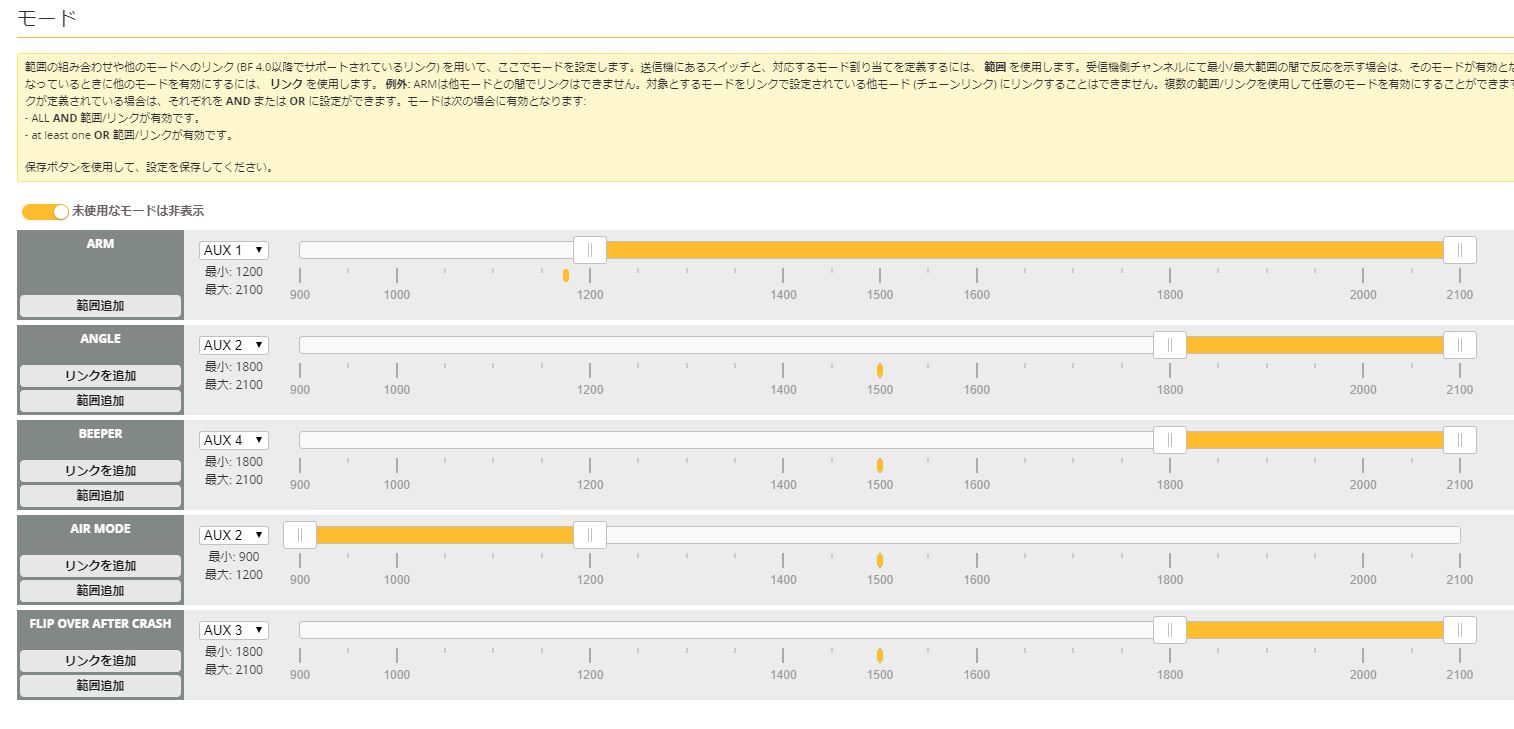
OSDはタイマー2を3分にしました。RSSIアラームも20→30にしました。あとは適当。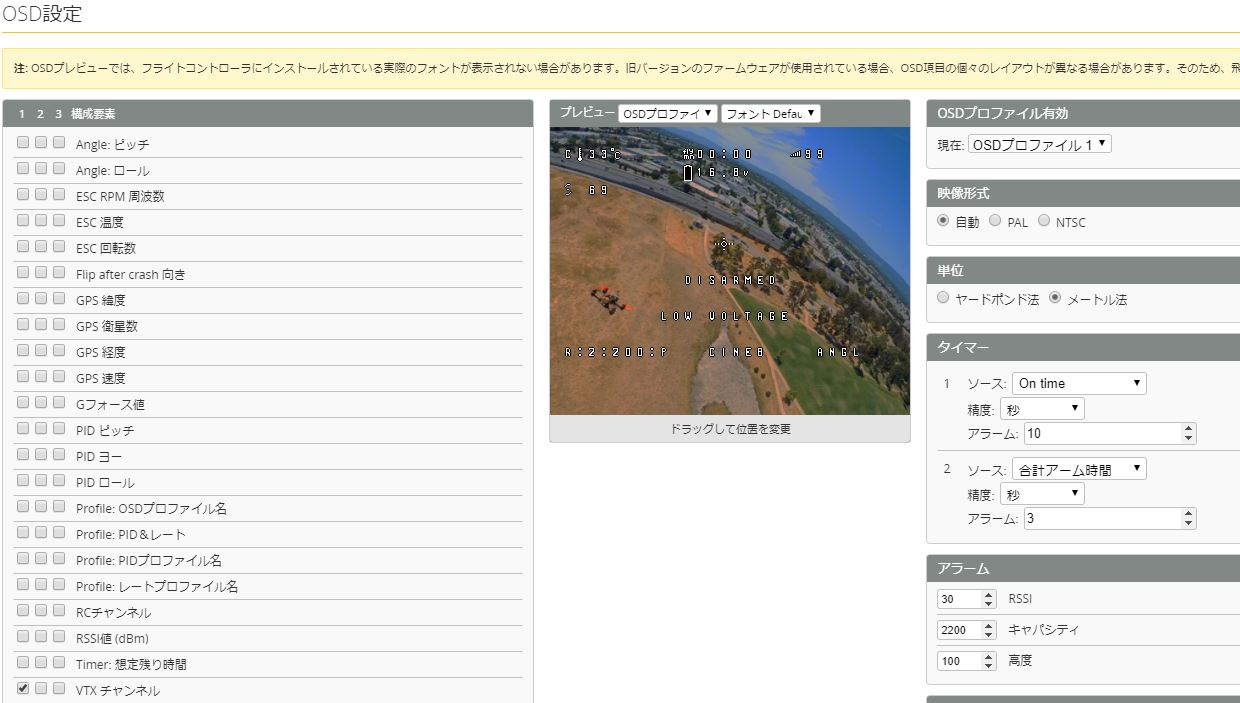
モードもいつも使ってる設定で、Larva X HDと同じ。
更にHAJI VLOGSさんの指摘通り、モーターマッピングを変更します。
元は、上から B10,B06,B07,B08 の順ですが、これを、
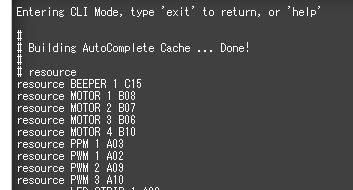
B08,B07,B06,B10の順にします。
CLIのコマンドラインから、 resource MOTOR 1 B08 等と入力して、リターンで変わります。全部入れたら SAVE を忘れずに入力。
既に出ている行をコピペして修正すると楽です。
結果、以下のバージョンで動きました!
 CPU使用率も8-10%程度と低いです。
CPU使用率も8-10%程度と低いです。
というわけで、できました!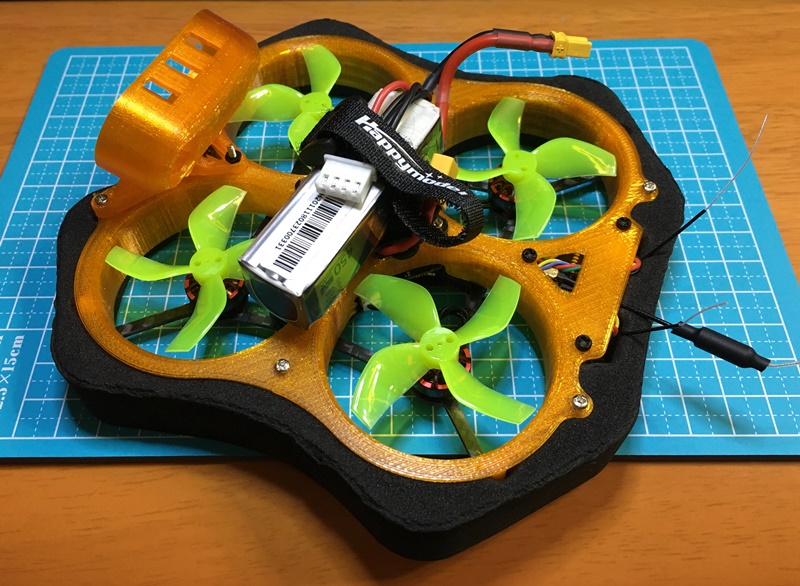
ホントは色々あったんだけど、とにかく飛びました! 4時間以上かかったと思う・・・
更に、モーターマッピング関連で半日・・・
しかも、 電源コネクタとプロペラが近い!紙一重!!最初当たりました!
電源コネクタとプロペラが近い!紙一重!!最初当たりました!
あと、 取説が薄くなっていてほぼ見えません😅😨
取説が薄くなっていてほぼ見えません😅😨
Youtubeを見ると、濃いのもあるので、コピーを繰り返して薄くなったんじゃないかと。
何を書いてあるのか分からんトコ多数。
フレームも3Dプリンター製だから、統一感はあるけどねぇ。
確かにハンダゴテは不要だけど・・・結構大変なDIY・・・初心者向けではありません🥶
なんとか飛ぶようになったけど、イマイチ安定感がない感じ。まだどこかに設定あるのかなぁ。
それと、半径30m位でRXLOSS出る!3Sなのに・・・FlskyのRXを付けるしかないな。
買っちゃいけない機種かも!