







Larva X HD 復活!!
ようやく動くようになった!・・・というキロク
実は、5月初めから動かなくなってました😨
理由は・・・自らが招いてます!

元々、BTFL 4.0.6 というファームウェアで、なんとか動くようになっていたんだけど、
![]() CPU負荷が20%近くになります。新しいファームだとスゴク下がることが分かってるし、周波数の設定も新しい方がやりやすいので、UPすることにしました。
CPU負荷が20%近くになります。新しいファームだとスゴク下がることが分かってるし、周波数の設定も新しい方がやりやすいので、UPすることにしました。
通信距離も100m程度だったので、UPしたら伸びるんじゃないかとも♪
(これ、プロポのアンテナを間違えてたので原因違うかも知れないけど、この時点では気付いてない)
ドロ沼の始まりでした・・・
機体をつないで、ImpulseRCを起動します。
Betaflight Configuratorを起動し、DFUモードでUpdateを押します。
BTFL4.2.9 が最新だったので、これを選択しました。

ココカラ実際には、4.1.0を試したり、4.0.6に戻したり色々やったけどナカナカ上手く行かず、メチャクチャ時間かかりました・・・
結論だけを書きます。できてしまえば大したことじゃなかった。

まず、水平キャリブレーションをします。水平なところに置いて、ポチッと。

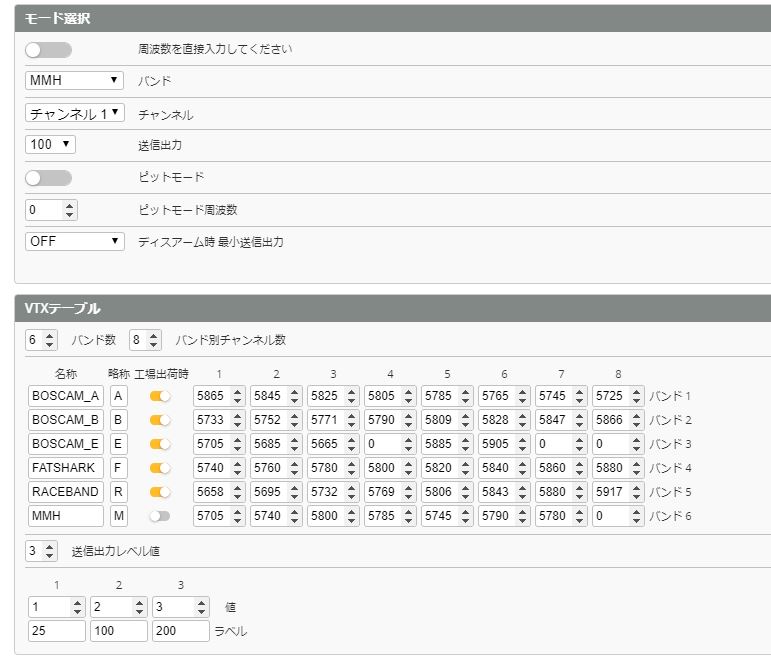
ポートのVTX設定はこんな感じ。
基本設定は、
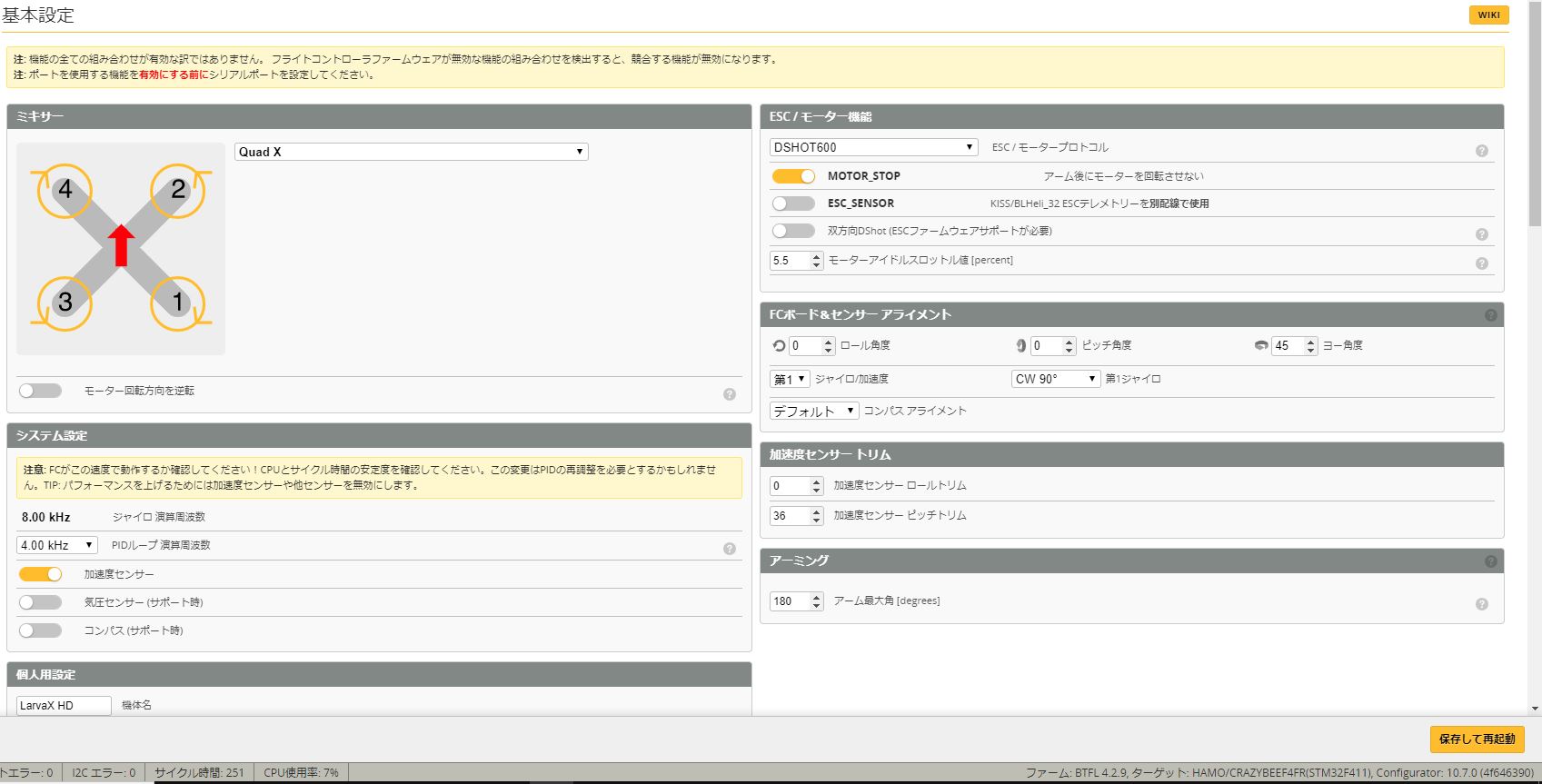
こんな感じ。”ヨー角度=45度”が0度になっていて失敗していました!45度にして下さい。
加速度センサートリムは私の機体では36度がデフォルトだったので合わせます。
MOTOR_STORをONにして、アーミング180度とします。

上記では、 FRSKY_X を選択します。この機体では、FRSKY_DはNGでした。
4.0.6の時は、FRSKY_DがOKで、FRFSKY_XがNGだったので、完全に逆! 気付くのが遅れ時間かかりました。

次はこんな感じ。
電源・バッテリーは何もしなくてもいいと思います。
私は 容量だけ、450mAh としています。

モードは、いつもの感じ。

OSDは、

タイマー2を3分にして表示します。
VTXテーブルもいつものパターンです。
プロポと本機をBindします。4.2.9だと、bind_rx でした。CLIコマンドラインで打ちます。
バインドできたら、受信機を確認します。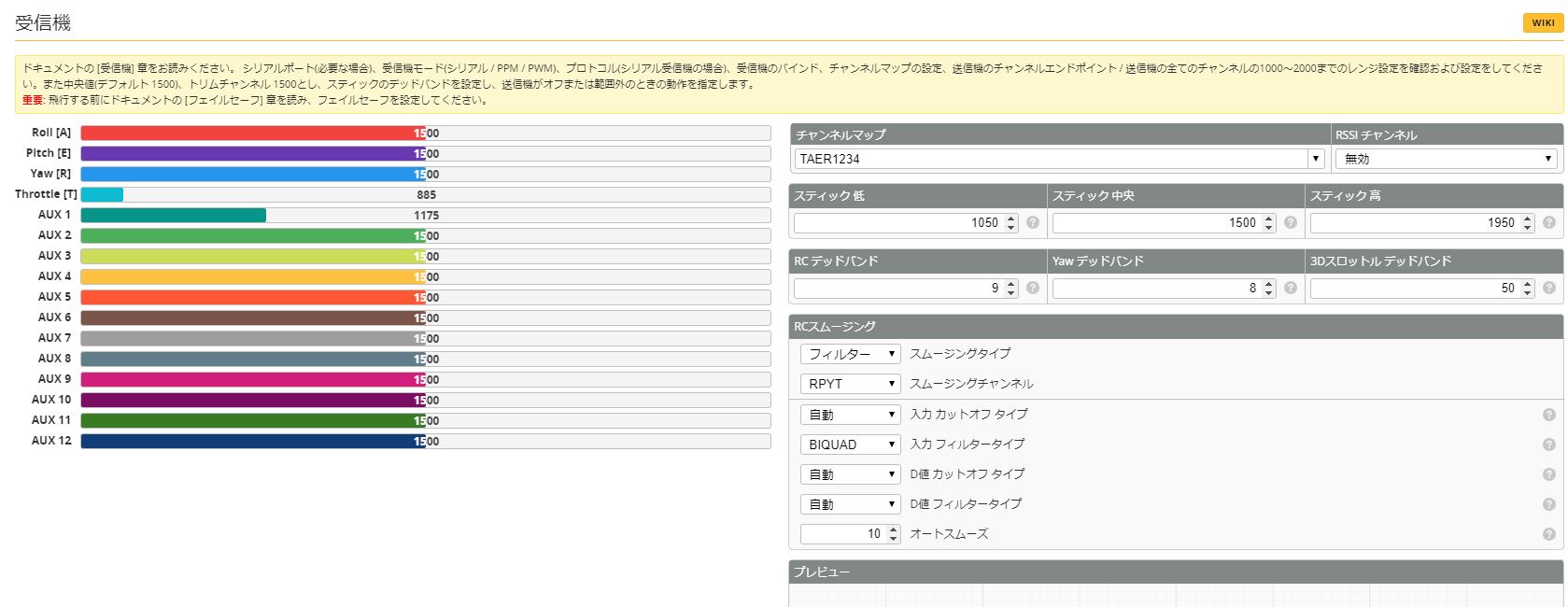
TAER1234で設定する、と取説にありますが、AETR1234でも動きました!どっちでもいいような感じです。
プロポの設定はTAERの方がこんがらがります(^^;)
以上でとりあえず完了です! CPU使用率は7%になりました!
それまではブルブルしてたりエラーが出まくっていたのに、直りました!
ホッとしました・・・😌
さて、飛距離はどうかな?