







Radiomaster TX16S + nanoTX 動いた!
ちょっとしたミスでドロ沼に入る!?・・・というキロク
またやらかした!
新しいプロポ(TX16S)で、CRUX35も動かそうと思ったのがまずかったのか、大変だった。一週間かかりました😱
新しいプロポ(TX16S)で、CRUX35も動かそうと思ったのがまずかったのか、大変だった。一週間かかりました😱
ここでは、結論だけをメモします。
■目的
Jumper T-Liteに取り付けて動作しているnanoTXを取り外し、4in1のTX16Sに外部モジュールとして取り付ける。
(なのでELRSのバージョンはそのまま(Ver2.2))
Jumper T-Liteに取り付けて動作しているnanoTXを取り外し、4in1のTX16Sに外部モジュールとして取り付ける。
(なのでELRSのバージョンはそのまま(Ver2.2))
接続の為のアダプターやケーブルは前回製作済み。
■手順
1.LUAスクリプト(elrsV2.lua)を作り直し、TX16SのSDカード(\Scripts\tools)にコピーする。
1.LUAスクリプト(elrsV2.lua)を作り直し、TX16SのSDカード(\Scripts\tools)にコピーする。
2.プロポ側にCRUX35用の機種画面を登録する。(ELRSの設定で)
3.CRUX35をベータフライトに繋ぎ、CLIコマンドラインで
GET expresslrs_UID と打って、 0,0,0,0,0,0 以外の数値が入っていたらクリアする。
SET expresslrs_UID = 0 と入力し、その後 save するとクリアできる。
3.CRUX35をベータフライトに繋ぎ、CLIコマンドラインで
GET expresslrs_UID と打って、 0,0,0,0,0,0 以外の数値が入っていたらクリアする。
SET expresslrs_UID = 0 と入力し、その後 save するとクリアできる。
(3.は、しなくてもバインドできる時もあった)
4.その後、ベータフライトの バインド を押し、FCのLEDが素早い点滅になったら、
プロポの電源を入れ、ExpressLRSのLUAを起動し、BIND を押す。
必ず、ベータフライト側のバインドを押してから、プロポの電源を入れる。逆はNG。
すぐ同期する。
5.ベータフライトの受信機のスライドバーがプロポと動機すればOK。
GPSが衛星待ちしていると、バインドが切れたような挙動(”C”が”ー”になる)になるが、気にしない。
これだけ。5.がダメな現象だと思い、一週間位迷走した・・・GPSのせいだった。
順に。
1.ExpressLRS Configurator を起動し、
 迷ってるうちに2.5にしたけど、2.* ならなんでもOKと思います。
迷ってるうちに2.5にしたけど、2.* ならなんでもOKと思います。
(3.*にしてはイケません。今のトコ Happymodelから3.*用のFCアップデートが出ていないので。)
1.ExpressLRS Configurator を起動し、
迷ってるうちに2.5にしたけど、2.* ならなんでもOKと思います。(3.*にしてはイケません。今のトコ Happymodelから3.*用のFCアップデートが出ていないので。)
このような感じ。Binding_Phraseを設定してますが、CRUX35側はFC内蔵なので、CLIで設定しないといけません。
UIDというもので、このスクリプト作成中に出てきます。これを記録して、CLIコマンドで、
SET expresslrs_UID =00,11,12,13,14,567 のように入れます。
Binding_PhraseをUIDに変換してくれるページがあり、
https://www.expresslrs.org/2.0/hardware/spi-receivers/
ここです。
使い方は、All About iPhoneさんの、
UIDというもので、このスクリプト作成中に出てきます。これを記録して、CLIコマンドで、
SET expresslrs_UID =00,11,12,13,14,567 のように入れます。
Binding_PhraseをUIDに変換してくれるページがあり、
https://www.expresslrs.org/2.0/hardware/spi-receivers/
ここです。
使い方は、All About iPhoneさんの、
にあります。
出来たLUAスクリプトをプロポのSDカードに入れればOK。

2.プロポにCRUX35を登録します。
今回は先に作ったMobula6のものをコピーします。
今回は先に作ったMobula6のものをコピーします。
 Internal RFを OFF にして、External RFは CRSF を選びます。
Internal RFを OFF にして、External RFは CRSF を選びます。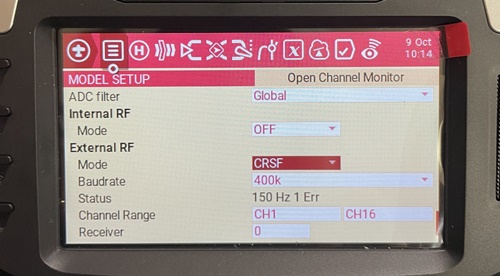
3.はそのまんまなので省略。
4.も同じく。電源入れる順番に注意。元々何も入っていなければ、注意しなくてもいいかも。
無事バインドできれば、
 こんな感じになり、プロポのステックを動かすとバーが動きます。動けばOK!!
こんな感じになり、プロポのステックを動かすとバーが動きます。動けばOK!!
こんな感じになり、プロポのステックを動かすとバーが動きます。動けばOK!!5.は、下の写真右上隅の C が途中で消えて ー になっても、4.のスライドバーが動くなら気にするな、ということです。(GPS付きの場合)
なお、ベータフライトでGPSを無効にするか、
エキスパートモードでココにチェックを入れると、GPSを無視してアームできるようになります。
 更に、アームしない理由がベータフライトに表示されていました。起動画面です。知らんかった!
更に、アームしない理由がベータフライトに表示されていました。起動画面です。知らんかった!
 拡大すると、
拡大すると、
 MSPというのは機体とベータフライトを繋ぐとでるらしい。この場合、GPSがアームを無効にしています。
MSPというのは機体とベータフライトを繋ぐとでるらしい。この場合、GPSがアームを無効にしています。
エキスパートモードでココにチェックを入れると、GPSを無視してアームできるようになります。
更に、アームしない理由がベータフライトに表示されていました。起動画面です。知らんかった!拡大すると、MSPというのは機体とベータフライトを繋ぐとでるらしい。この場合、GPSがアームを無効にしています。エラーの内容は、ここに。
一覧表になってます。
今回も多数の先人達の情報を読み違えて混乱し、まとめ直してなんとかなりました。感謝!!
なんとか飛ばせるぞー!!
迷走ぶりは動画で。