







加速度センサートリムってなんだ?
やっと少しわかった・・・というキロク
ドローンの初期設定では、真っすぐ上昇する安定した機体にしたい。と、誰しも思うはず。
アングルモードで、無風なのに両手で操作し続けないと定位置を保てないのは調整が悪いだけ!
でも、これがかなり難しい。
そもそも水平キャリブレーションする時にズレたら、それに合わせて調整も変わる。フレームだって変形してるし・・・
皆さんどうしているんだろう?
私の場合、
1.まずはステックが 1000ー1500ー2000 に近くなるよう調整する
サブトリムとエンドポイントで調整します。(Jumper T8SG+の場合はサブトリムとスケール)
(デフォルトは1050-1500-1900になっているのでそのままの時も😅)

2.プロポのトリムでソコソコ真っすぐ上昇するよう調整する
 としていた。
としていた。
これが・・・典型的なダメな仕業らしい!!😓
なぜダメなんだろう。ちゃんと機種ごとに持てるけどねぇ。
FCで分けてる場合はダメだろうけど。
なぜか誤動作の原因になるらしいです。
プロポのトリムでゴマ化すのは下の下なんだとか・・・知りません・・・
じゃどうするの?🤔
それが、加速度センサートリム らしい。
つまり、上の1.の作業の後、2.ではなく、加速度センサートリムを調整して安定したホバリングを目指す。
Betaflight Configuratorの これのことです!
左右が 加速度センサーロールトリム で、
前後が 加速度センサーピッチトリム に相当する。
プラスマイナスで方向が決まるというもの。プロポのトリムは中立位置にして、ここを調整するのが正しいマナーだそうだ。
それにしても、ちょっとずらしてまたベータフライトに繋ぐのか?メンドー!!
そのメンドーを省くのが、スティックコマンド というもの。
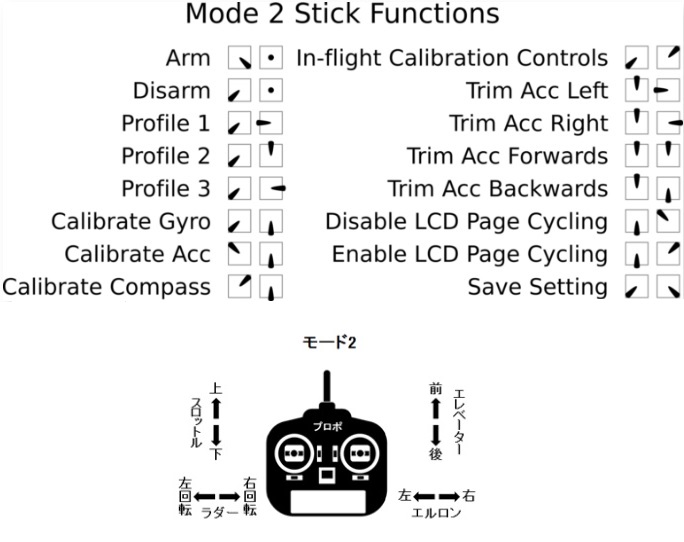
(ラジコン日記(中級編)さんより引用) ありがとうございます!
ドローンは繋がっているけど、アームしていない時に、プロポのスティックを動かすと
設定を変更でき、ベータフライトが不要。
SAVEしなくても自動でキロクされるようです。
プロファイルも変えられたんだ・・・知らなんだ。
Calibrate Accというのは加速度センサーのキャリブレーションで、微調整はTrim Acc・・・というヤツを使う。
例えば、ホバリング中に右に流れるようなら、逆方向のTrim Acc Leftを1回やる、という感じ。
戦艦プラモと小さなドローンが好きさんのブログがわかり易い!ありがとうございます。
具体的には、まず1.から。
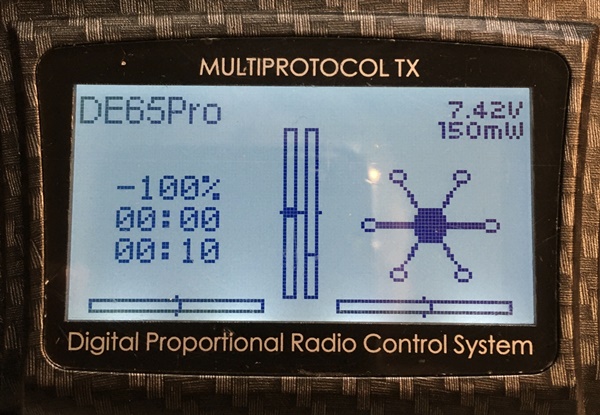
Jumper T8SG Plusを使ってる人はもうあまりいないと思うけど、例えば、Mobula6と繋いでベータフライトを起動すると、
こんな感じ。スロットルは 999-1500-2000 になってます。Jumper T8Sgplusはピタッと来ないので大体です。
こうするために、まず プロポ(Jumper T8SG Plus V3)の、
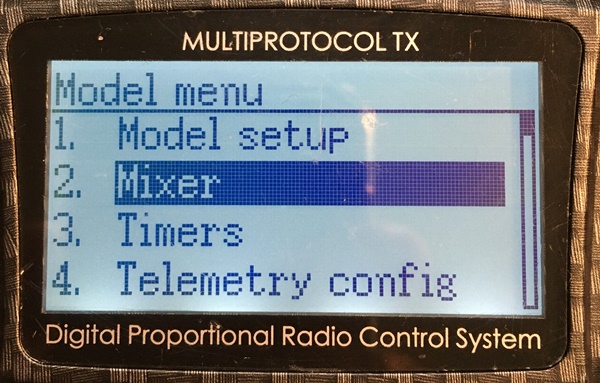 Model menuからMixerに入り、
Model menuからMixerに入り、
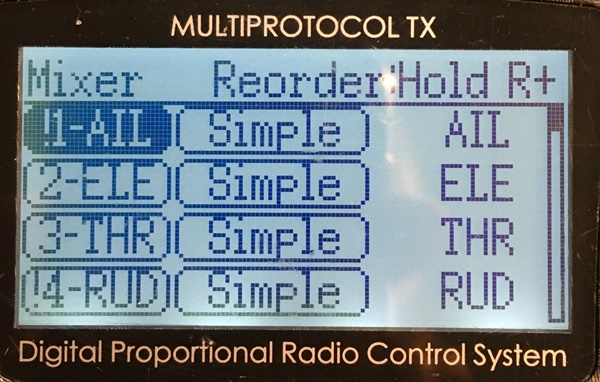 例えば、エルロンなら、
例えば、エルロンなら、
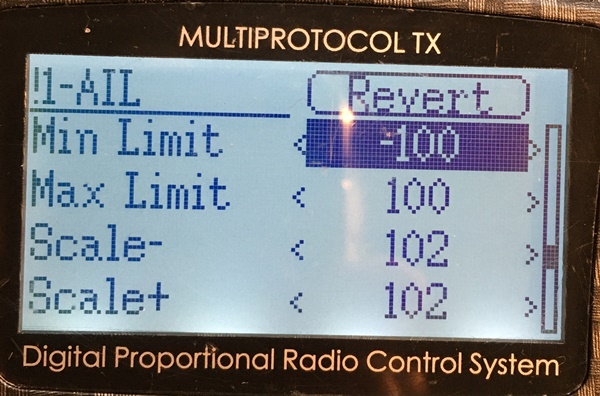

ScaleとSubtrimを使って両端と中心位置を合わせる感じです。OpenTXとはちょっと違うかな。
続いて、加速度センサートリムを合わせます。
今回は、Calibrate Acc はやっていません。これする時は、水平にするんだろうなぁ。
実際にドローンをスタブモード(アングルモード)でホバリングしてみて、流れ方向と逆にスティックコマンドを打ちます。
(アクロやエアーでは関係ない(加速度センサーを使ってない)操作です)
だいたいイイ感じ(ホバリングしながら旋回してもなんとかなりそうな範囲)になったら、完了!
ベータフライトに繋いでみると、
こうなりました!
なるほどねー!
情報提供頂いた皆様、ありがとうございます!!
ただ・・・体得した!と勘違いした私は、CRUX35でも実施!→ なんと微調整不能で-200とか入ってアラーム鳴る始末。
その後、ベータフライトにつなぐとCPU負荷が12%→50%超に!ファームを再インストールしても直りません。
4.3.0のバグでCPU負荷が突然増える、と言う情報もあるけど・・・いじくらなければ良かった😱
何事も中庸が肝要・・・
Jumper T-Lite 設定編
Happymodel Mobula6 HD キター
SKY02X キター!