






双方向DSHOT:BLHeli_M で挑戦!(Mobula6 HD)
以前、Trashcan75mmに JESC firmware を使って 双方向DSHOTにした、というのを書いた。 悪くなさそうなので、今度は、これもイマイチ調子が悪いMobula6 HDに双方向DSHOTを適用しようというモノ。
更に、 今回は 無償のBLHeli_Mでやってみる!
手順はおおまかに、
1.インストール用の BLHeli Configurator をダウンロードしてPCにインストールする
2.BLHeli_Mをダウンロードして更新する
3.BLHeli_Mを設定する となります。(たぶん・・・)
1.BLHeli Configuratorをインストールする ダウンロードは、ここからできます。(BLHeli Configurator 1.2.0 Jazzmaverick Edition Beta-4)  私の場合は、Windows10 64bit なので赤丸のやつ。
私の場合は、Windows10 64bit なので赤丸のやつ。
解凍して、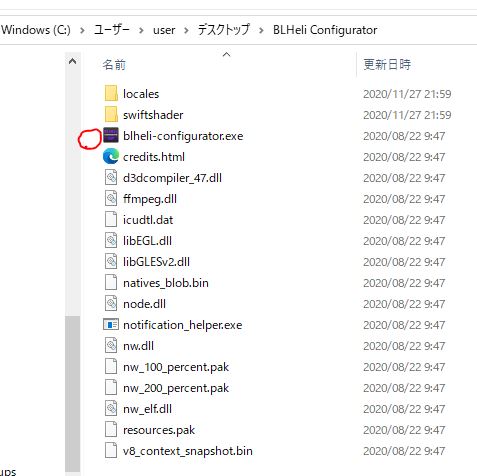 赤丸の blheli-configurator.exe を起動。
赤丸の blheli-configurator.exe を起動。 起動しました!
起動しました!
Mobula6 HDをUSBケーブルでPCと接続します。(扇風機で機体を冷やします)
ソフトのConnectをクリック!
”プロペラを外せ” ”バッテリーを繋げ”と出ています。
私の場合、プロペラは外さずにバッテリーをつなぎました。
 Read Setupをクリック。
Read Setupをクリック。
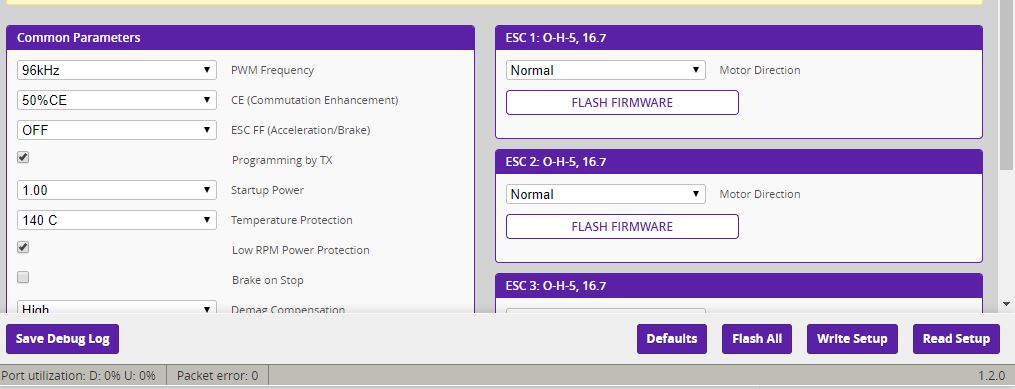
Mobula6 HDのファームは O-H-5 Ver16.7らしい。
Flash Allをクリック。おっと、Motor Directionがノーマルだけどいいのかな?(→いいようです)
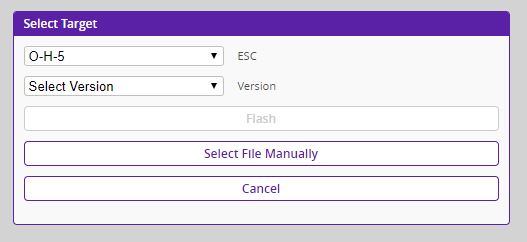
こんな画面になった。ESCはO-H-5でいいのかな?信じるとして、

あれ? Version に16.9がない・・・16.71までしかない。これでいいのか?調べてみることにします。
BLHeli_S SiLabsというところにファームウェアがあります。
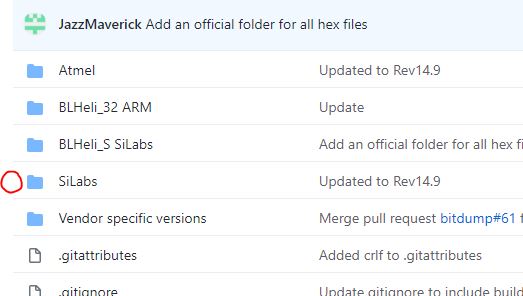
SiLabsに入ると、バージョン別のフォルダが沢山!
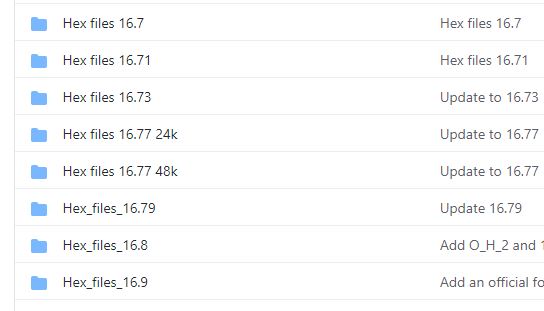
16.77 48Kというフォルダには、

ここに、 O_H_5_48_・・・というファイルがあるので、16.77に対応していそうだが・・・どうする?
(16.73までか、16.9を使うのが良いようです。それ以外はPWM制御が怪しいようです)
Mobula6HDでは16.9は選択肢に出てこない・・・
ココカラしばらくは失敗キロクです。
結論は、下の方の■復活編! にあります。
ちょっと迷ったけど、まずは”ソフトの言う通り”やってみます。
改めてBLHELI ConfiguratorにUSBで機体を繋ぎ、バッテリーを接続して、
Read Setupをクリック。
Flash Allをクリック。
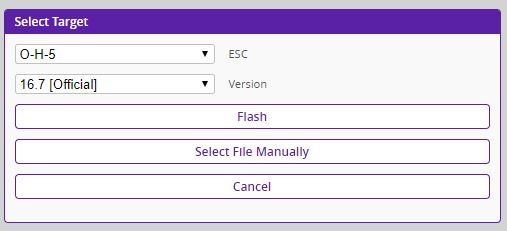
Versionを16.7にして Flashをクリック。
(選択肢の16.71はエラーになりました)
すると、ファームウェアがフラッシュされます。モータ4個分終わるまで待ちます。
(下図は2個目の途中)
超カンタンです。

完了したら、Write Setupをクリック。
ひとまず完了です! Disconnectしてバッテリーを外します。
次に、
BetaFlight Configuratorに接続します。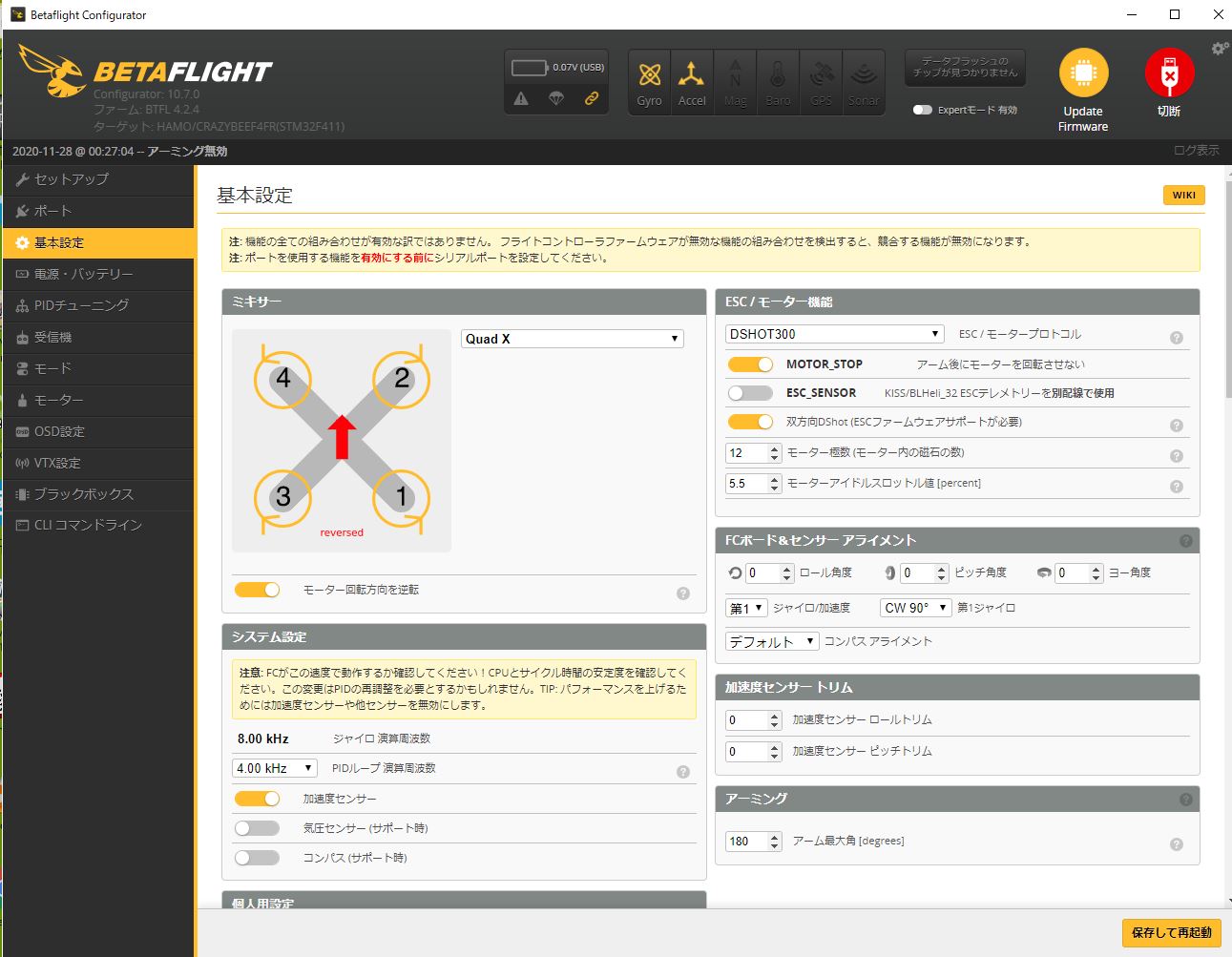
DSHOT300 (これは最後にDSHOT600にしました)
双方向DSHOT ON
モータ極数 12
PIDループ 4.00kHz
として、保存して再起動します。
CPU負荷は、6%→設定後10% に上がりました。
しかし、モーターがほとんど動かない!!なぜ?(ToT)
当然、アームしても動きません・・・ヤバい!文鎮化寸前かも!!
■復活編!
BLHeli Configuratorのなすがままはダメなんだろうと考えました。
052さんの情報をメチャクチャ参考にして、自分なりにも少し調べて、
Mobula6 HDのファームは O-H-5 Ver16.7なので、まずはここから探すことにします。
BLHeli_S SiLabsへ行き、BLHeli_S SiLabsフォルダを選択、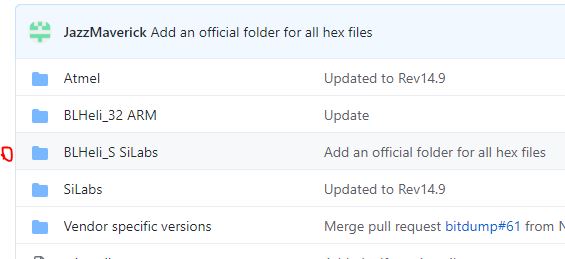
Hex files16.7フォルダを選択、

ここには、O_H_5_rev16_7 と O_H_5_rev16_71 がありました!
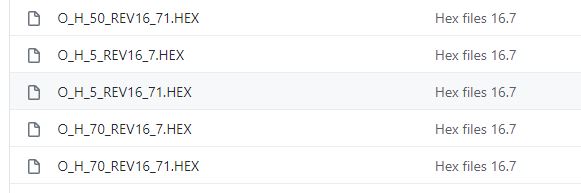
よくわからんけど、16.71を選択。
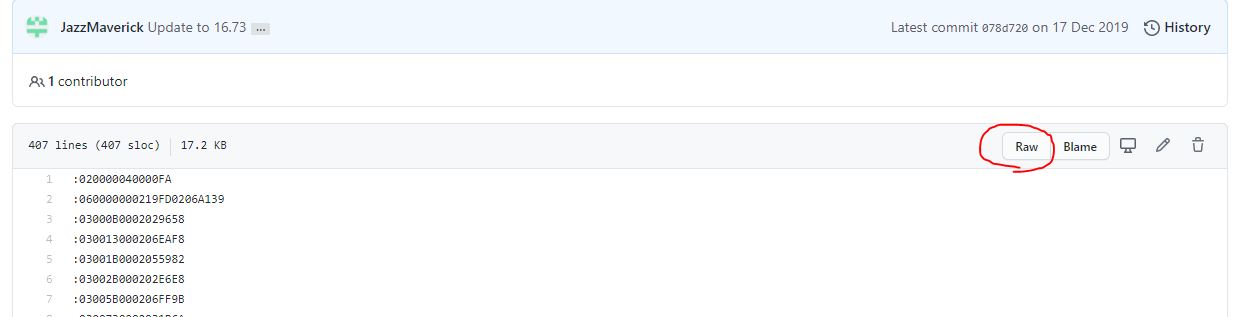
上の絵はバージョンが違う(^^;)けど、こんな感じで出るので Raw を右クリック。
ダウンロードフォルダに保存しますが、
これまたバージョン違いますが、
ファイルの保存の際、拡張子を HEX から hex へ小文字にするそうです。
(全くの受け売りです)
これで準備ができたので、BLHELI Configuratorを起動し、本機を繋いでバッテリーを付け、
Read Setup→Flash All と進みます。
下の画面で、Select File Manually を選択すると、
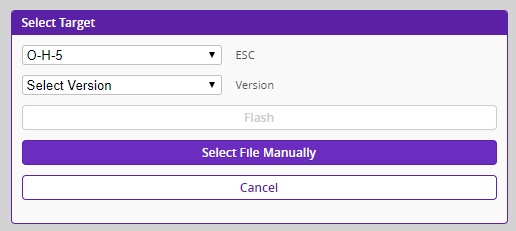
事前にダウンロードした、適合しそうなファイルが表示されます。
私の場合、16.71の他にも幾つか落としてあったので 3個表示されました。
16.73版は16.73のフォルダから取って来たもので これでも動くかも。まだやってません。
今は、16_71版を選択します。
ファイルを選択すると、書き込みがいきなり始まります!
完了した状態が下図。16.71になっています!
設定は、既に少し変更済みです。
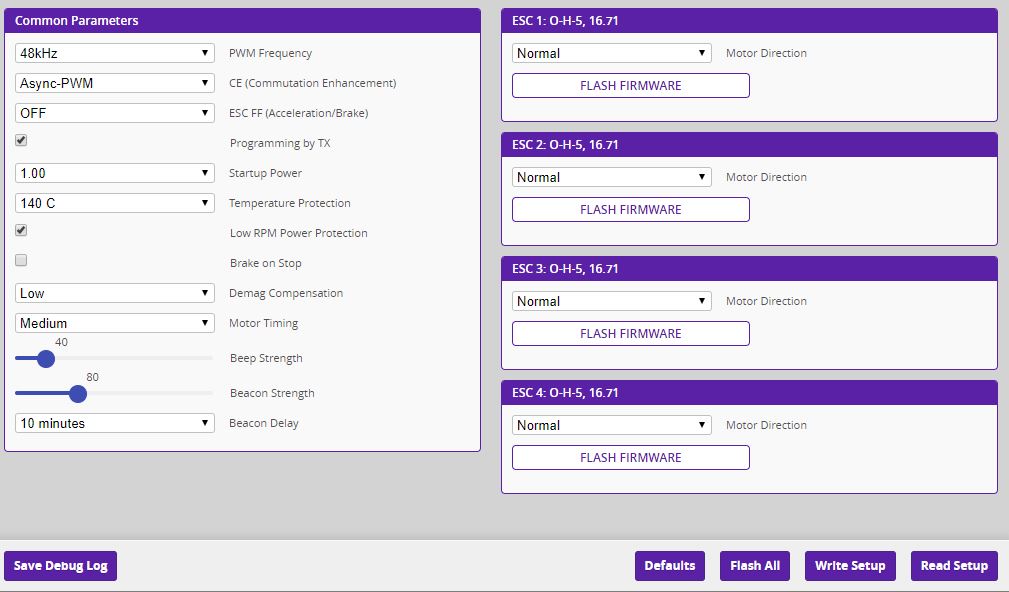
変更箇所は、
Startup Powerを0.5→1にしました。(052さんの受け売り)
PWM Frequencyを24→48kHzにしました。(ここではまだ変わってないけど)
(ちなみに、Motor Directionをリバースにしたら羽根は回るけど飛びませんでした)
Write Setupを押して終了です。Disconnectしてバッテリーを外しました。
BetaFlight Configuratorに接続します。
双方向DSHOTとかPIDは既に設定済みなので、モータの確認だけします。
モーターへ行き、バッテリーを繋ぎ、リスク・・・をONにして、Masterバーをそっと動かすと、

羽根が動いてインジケータも表示!!良かった!(上図は変わってないけど)
プロポからも動きました!とりあえず飛びそう!
双方向DSHOTが効くのかどうかはわかりません。
変更前に戻っただけかも(^^;)
家の中で軽く飛ばした感じでは、DSHOT300はイマイチです。機体が左右に少し振れます。
DSHOT600にすると収まります。FPVの見やすさに差が出る感じ。
DSHOT600にしてもCPU負荷は変わらないのでそのままにします。
そもそも、RXLoss等のエラーが出なくなることが希望だったんだけど、
どうかな・・・
動画は先に公開済みです。

