






Happymodel Mobula6 HD キター
待ちに待って遂に到着!・・・のキロク
色々あったけど、発注から39日でようやく手に入りました。一安心。代引き2715円のままでした。
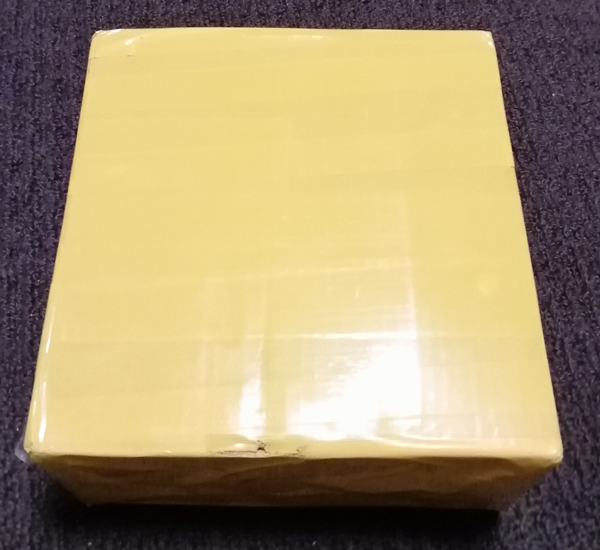
ガムテープでぐるぐる巻きの良い梱包です。

クッションも入って、

箱は無傷。

中味も問題なさそう!
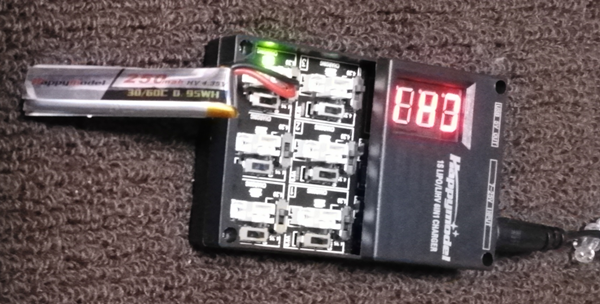
早速充電してみました。ちゃんと表示されます。電源は、Bugs3の充電器の電源アダプターがそのまま使えました。(1Aなので、6個同時は無理だな。0.2A×6個=1.2A・・・)
Betaflight ConfiguratorのCLI画面に行き、前回のTrashcan同様にバックアップを取ります。
その後、初期設定。moccaさんの動画を参考にさせて頂きました。
続いて各画面もザックリ設定します。
ファームウェアのアップデートとかはしません。私のような初心者には敷居が高いので。

最初のページは何もせず。水平キャリブレーションも”買ったまま”をとりあえず信じます(^^;)

ポートも何もしません。VTXがUART2にセットされていました。
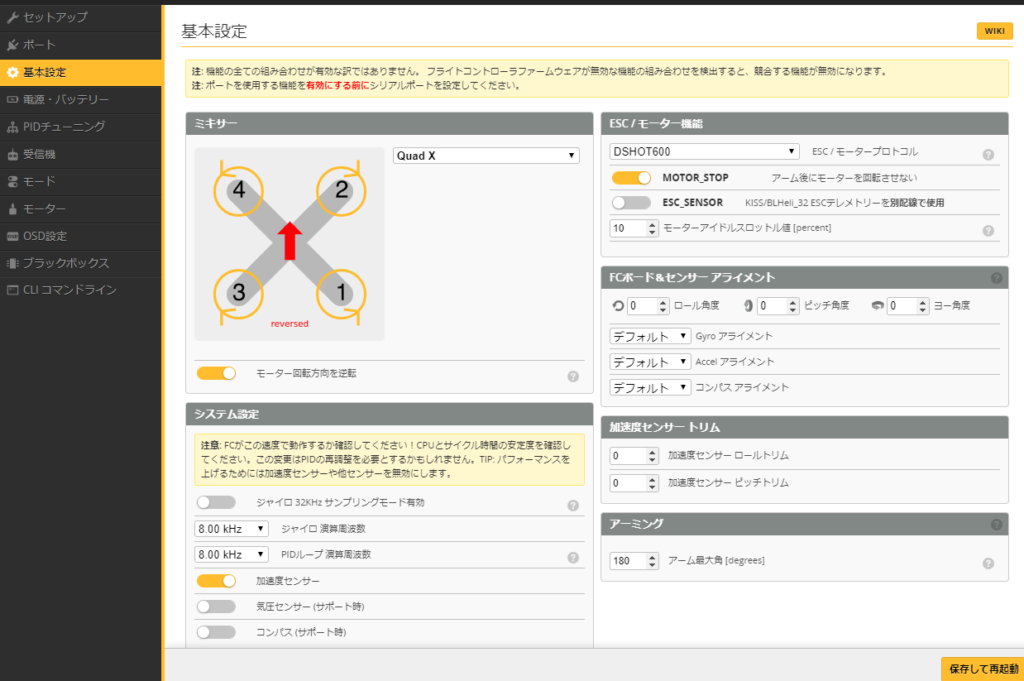
MOTOR_STOPを入れて、

カメラを30度にして、FRSKY_Xにして、AIRMODE常時をOFFに。

ビープ音は3つだけONにして後はOFF。そうしたら、保存して再起動を押します。その後、再接続します。

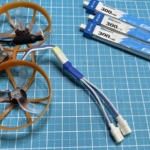
電源は 250mAhだけセット。保存します。
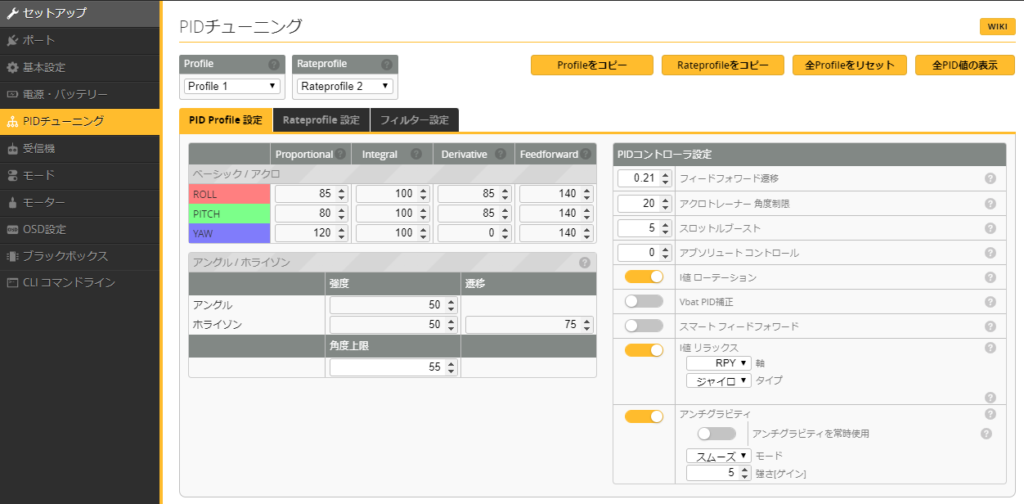
これはとりあえずそのまま。
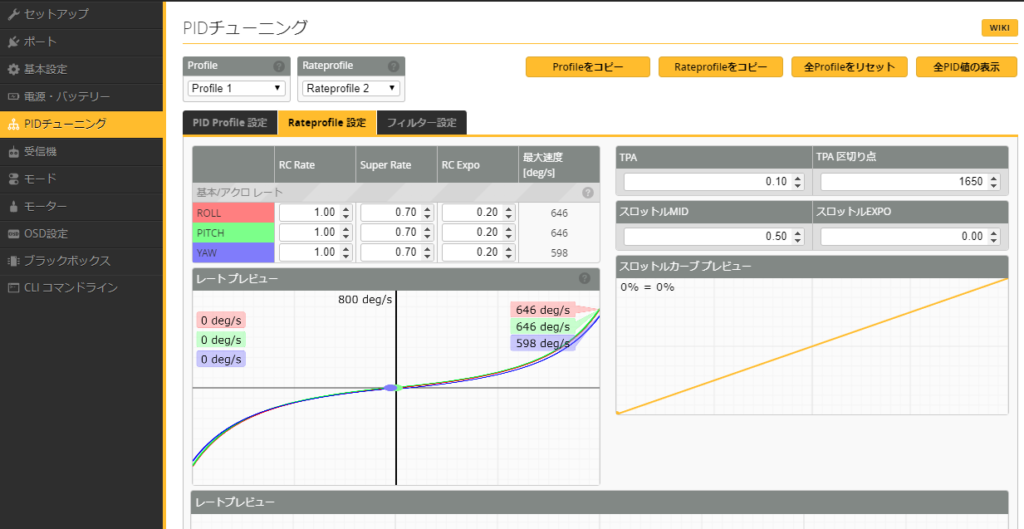
RC Expo だけ 0.2 にしてみた。保存します。フィルター設定は触らず。
受信機は、プロポを繋いでなくても、
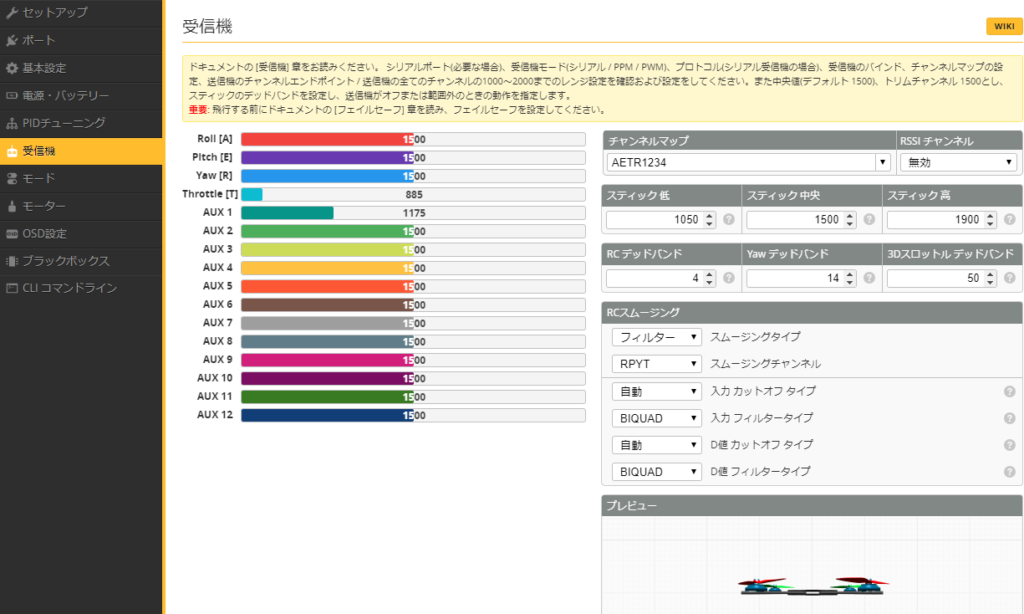
Jumper T8SG は、チャンネルマップを AETR1234 にします。これにしないとレバーが合いません。
(Aが1、Eが2、Tが3、Rが4チャンネル ということですね)
ウチのJumperは出来が悪いのか、Yawデッドバンドが14位必要な感じ。保存します。
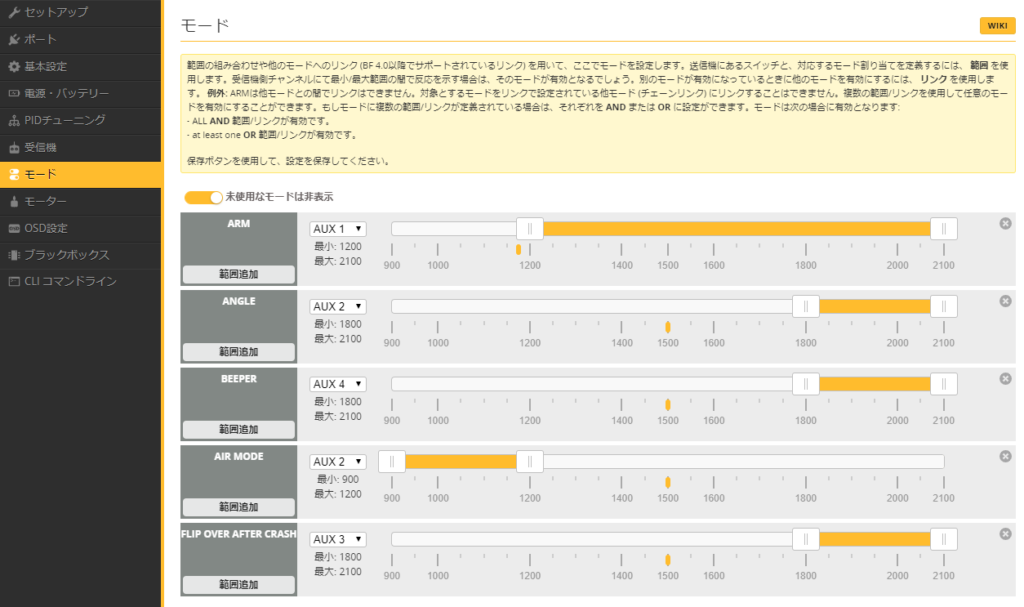
皆さまのを見て、モードはマネしましたm(_ _)m 保存します。
Trashcanに合わせています。
モータは何もせず。

OSDは 合計アーム時間のアラームを 2分 としました。あとはそのままで 保存します。
(その後、VTXチャンネルにもチェック入れました)

こんな感じで、ひとまず完了です。
続いて、ざっくりとプロポを設定します。新しいところに登録します(リセット忘れずに)。
登録する前にまずResetをしてから。これを忘れて上書きして大変でした・・・
FRSKY_Xにしてバインドします。moccaさんの動画では、”バインドボタンを押しながら電池をセット”とありましたが、私のは、電池をセットして、プロポのBindを押してからドローンのバインドボタンを押してもバインド出来ました。
vtxの周波数を変更します。これも前と一緒。(後でもいいのに映るのを確認したかった・・・)
Betaflight ConfiguratorのCLI画面に行き、一番下のコマンドラインに、
Set vtx_band = 3
Set vtx_channel = 1
Set vtx_freq = 5705
save
と1行ずつ順番に入力。saveします。
一旦ドローンとの接続が切れるので、再度接続して、更に接続を切るといいようです。
プロポの設定をします。
Jumper T8SG V2(V3) PLUS キター! 早速ハマる!!で書いたことの応用なので、割愛。
Betaflight Configuratorに戻ります。受信機のところで姿勢とか回転方向を確認します。
OKならなんとなく動くようになったはず。
私のは水平のキャリブレーションがイマイチだったらしく、真っすぐ上昇しません。(何度かやり直し)
アングルモードでしかコワくて飛ばせない状況では、設定値が正しいかどうかわからず。
とりあえず動いたのでヨシとしよう。