







Trashcan 75mmに 双方向DSHOTを導入!
双方向DSHOTを導入しました!・・・というキロク
YouTubeで教えて頂きました。その後のキロクです。
”双方向DSHOTを導入するとモータの振動も抑えられ、電池も長持ち!”
という夢のような悪魔のような囁き。
確かに前々から気になっていた。踏ん切りがつかなかったけど、囁かれると・・・
やってみよう!
Trashcan75㎜で双方向DSHOTにするには準備が必要です。(よく分からんことも多いけど)
まず、
双方向DSHOTにする目的 ですが、
■DSHOTというのは、モーターを制御する方法の1つ。FCからESCへモータの制御指令が出ますが、その指令方法の1つで、双方向なので、ESCからFCへも結果の情報が返ってくるようになる。
■これにより、モータの状況をリアルタイムにFC側で知ることができる。
これを利用し、
■モータのノイズを除去するためのフィルターを、新たにRPMフィルターにすることで、遅延が減り効率がUPするらしい。
もちろん、
双方向DSHOTを使うには、条件があります。
1.ESCのファームウェアがBLHeli_32かBLHeli_Sであること
(Trashcan75㎜やMobula6 HDはBLHeli_Sです)
2.BLHeli_Sの場合は、JESC Firmware(有償) か BLHeli_M(無償)を導入必要
(今回はJESC Firmwareでやってみます)
3.Betaflightは4.1.0以降にバージョンアップ必要
(今回は4.2.2でやってみます)
以下は、052さんのブログの情報を元にTrashcan75mmに適用したキロクです。
自分がやったメモですので、正しくは052さんのブログを参照ください。抜粋ではなくてちゃんとしてる!
052さん、貴重な情報をありがとうございます!!
まず、JESC Configuratorをインストールします。
ダウンロード先はこちら。
JESC-Configurator_win64_1.2.9.zip をダウンロードしました。

解凍して、jesc-configurator.exe を実行。

起動しました!

これでESCのファームウェアの名前を確かめます。
事前にファームを確かめる、BLHeli Configuratorというものもあるそうですが、今回は使わないことにします。
Trashcan75mmをUSB接続して、次にバッテリーを繋ぎ、その次にConnectしました。
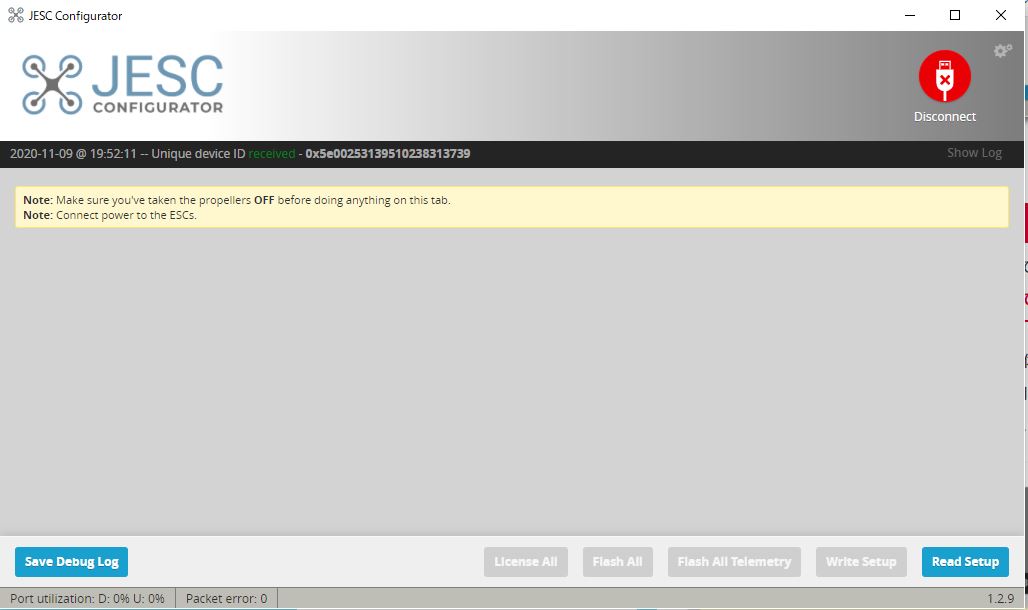
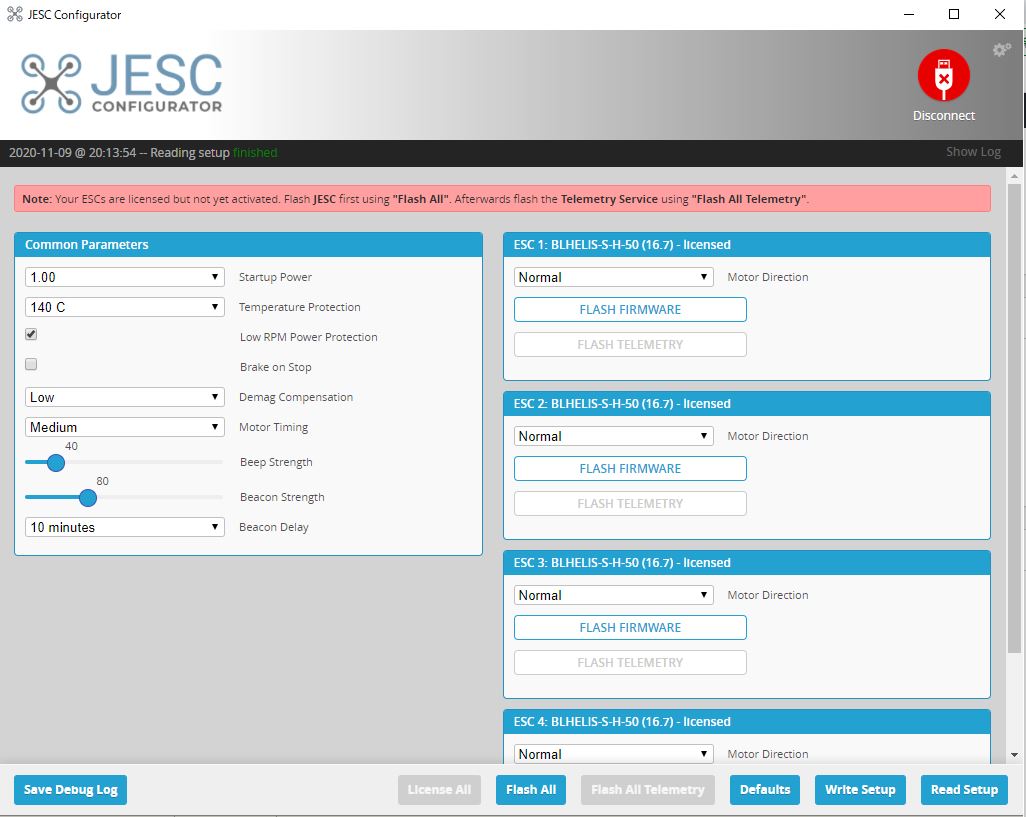
Read Setupを押します。数秒待つと、
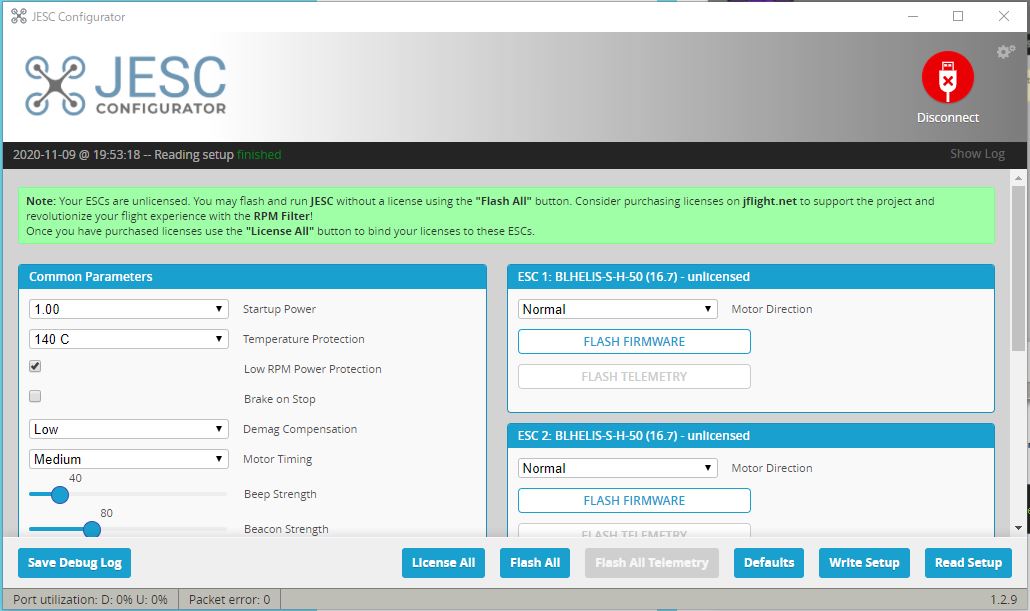
と出て、始まった感じ! ESC 1 のところに、
BLHELIS-S-H-50(16.7)-unlicensed
とでました。使えそうです!
起動画面のところに説明ありますが、この H があると、JESC対応版がある、ということです。
Hが無ければ、使えないから諦めろ、ということでしょう。
下欄にある License All を押して、
New Customer を Continue、(画面取り忘れた)
必要事項を入力しました。
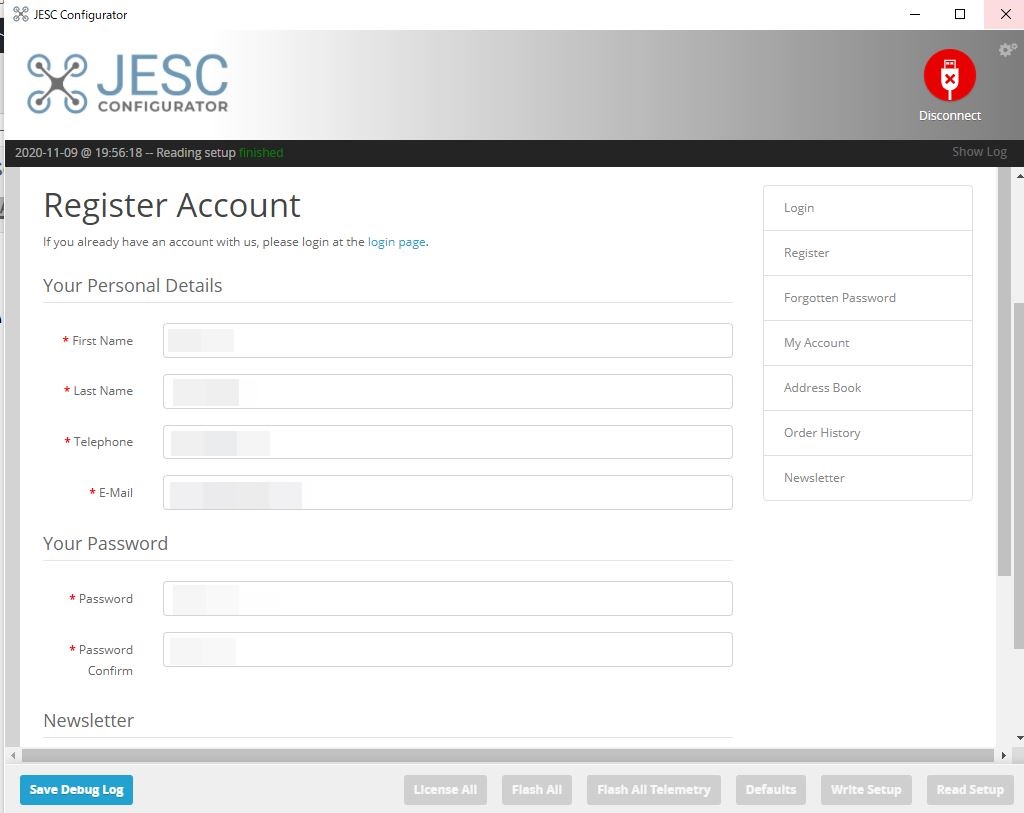
データをいれたら Continue。
アカウントができました。

Continueで、
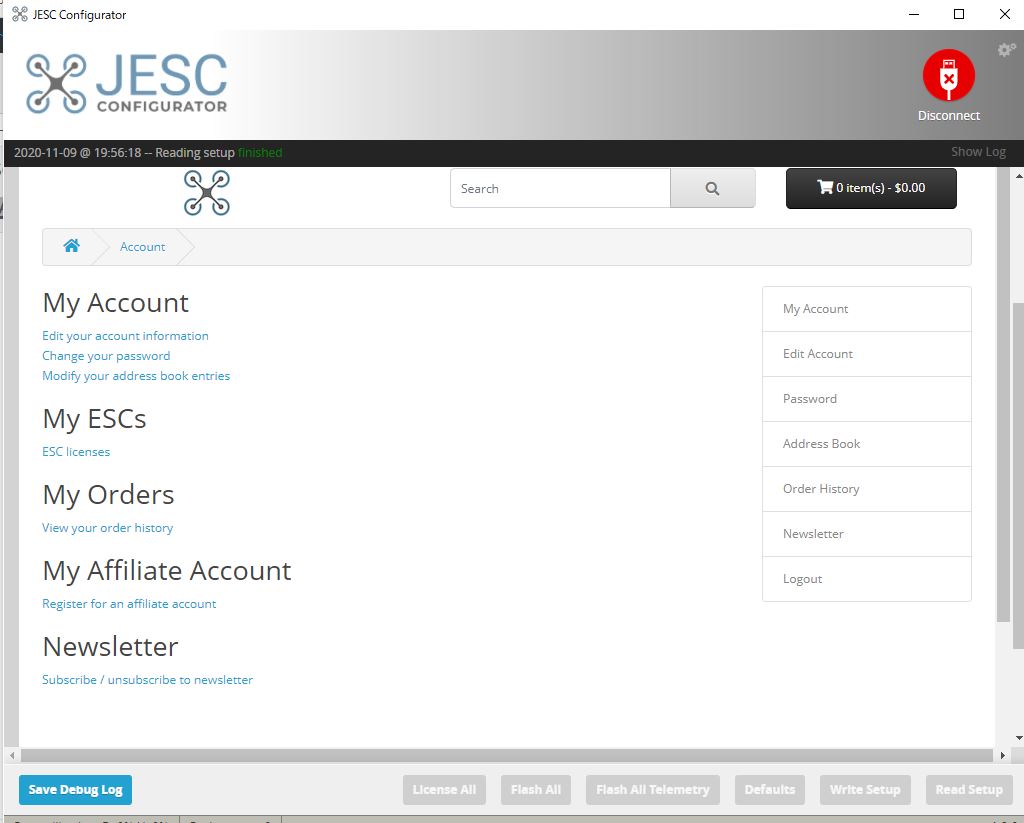
この、My ESCsの ESC licenses をクリックします。
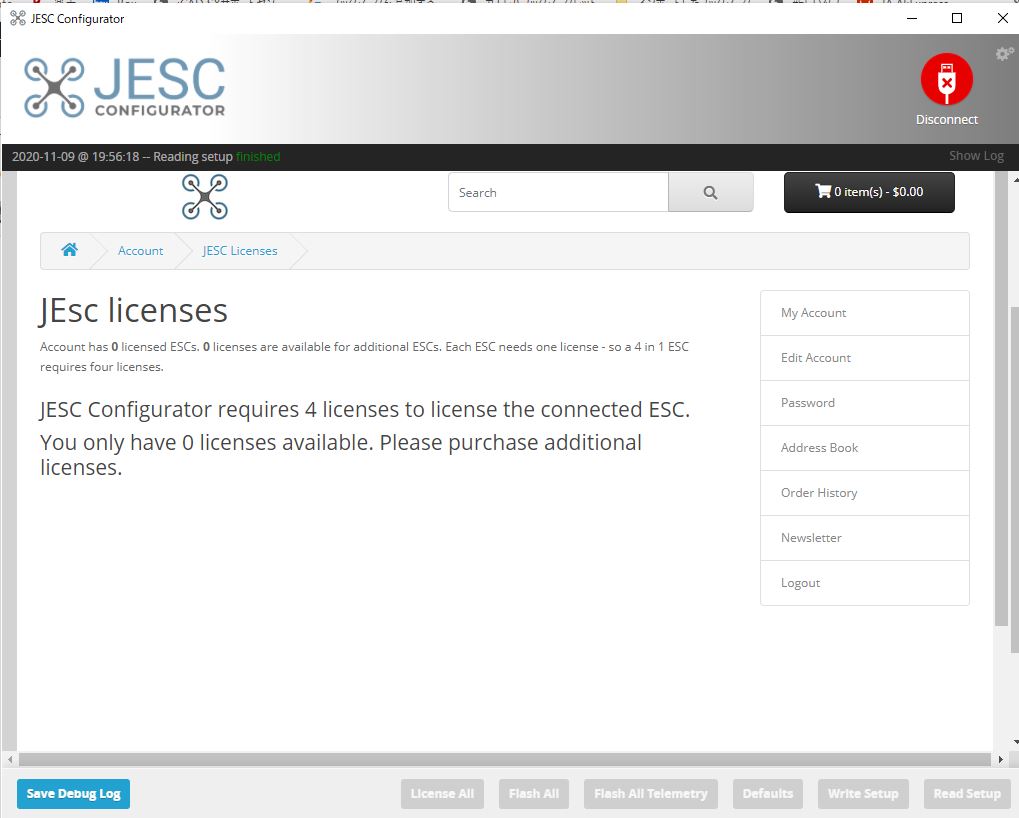
ここで、左上の おうちのマーク をクリック。

購入画面が出ます。私は、1台分として ×4 を買いました。 ADD TO CART をクリック。
後で考えると、事前にホームページから購入しておいた方が良かったかも。
カートに入っているので、カートをクリック。支払いに入ります。
私は、PayPalで支払いました。5ドルちょっとでした。
Back to Configuratorでもどります。
どうやったら戻るのか分からず! Continueからの License all、Activate ESCs で戻りました。
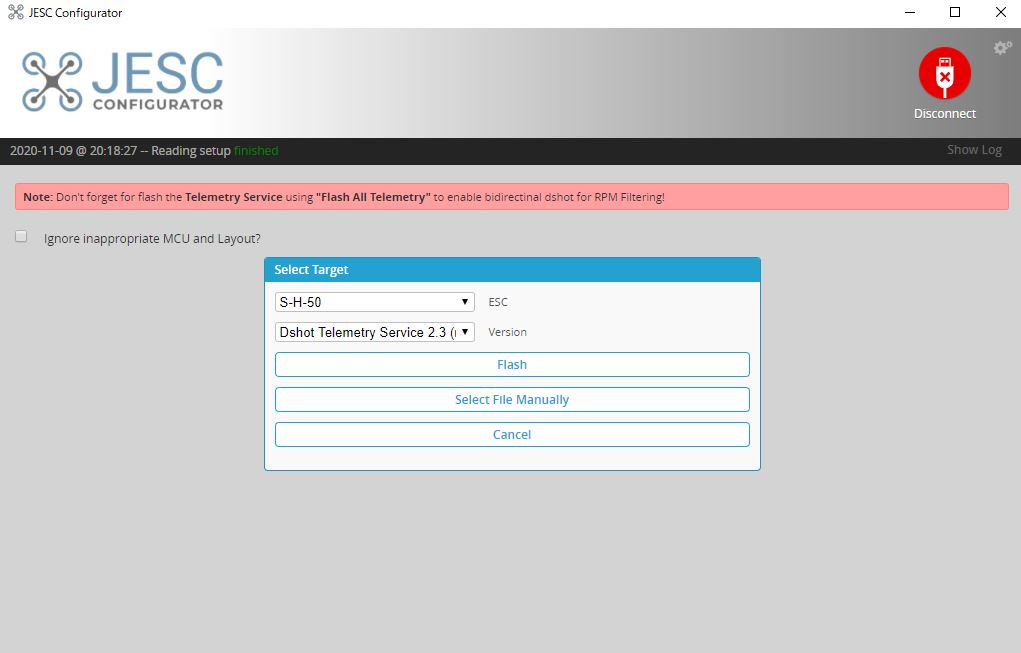
なぜか警告が出てます!Flash Allを実行しろ!ということなので押します。
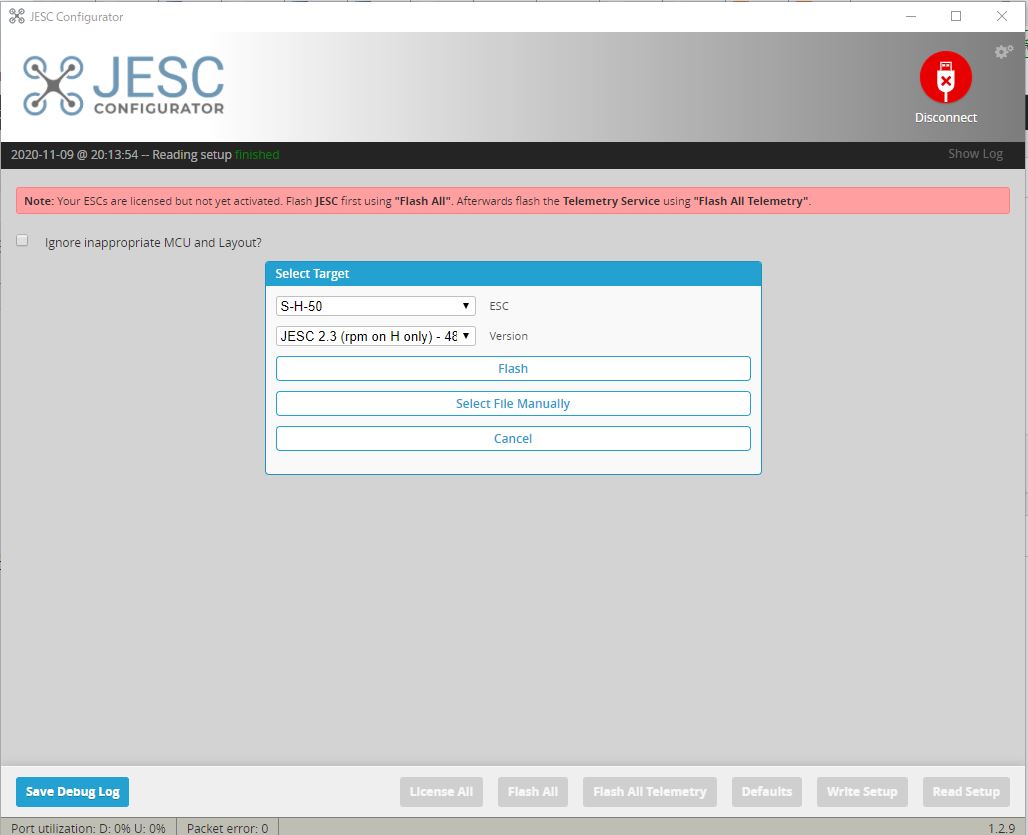
画面が進みました!警告出たままですが、versionを選択します。一番新しいヤツにします。
ただ、24kHz(3in…)と48kHz(Whoop) というのがあり、わからず(^^;)
48kHz(Whoop)にしました!
次の行の Flash を押します!
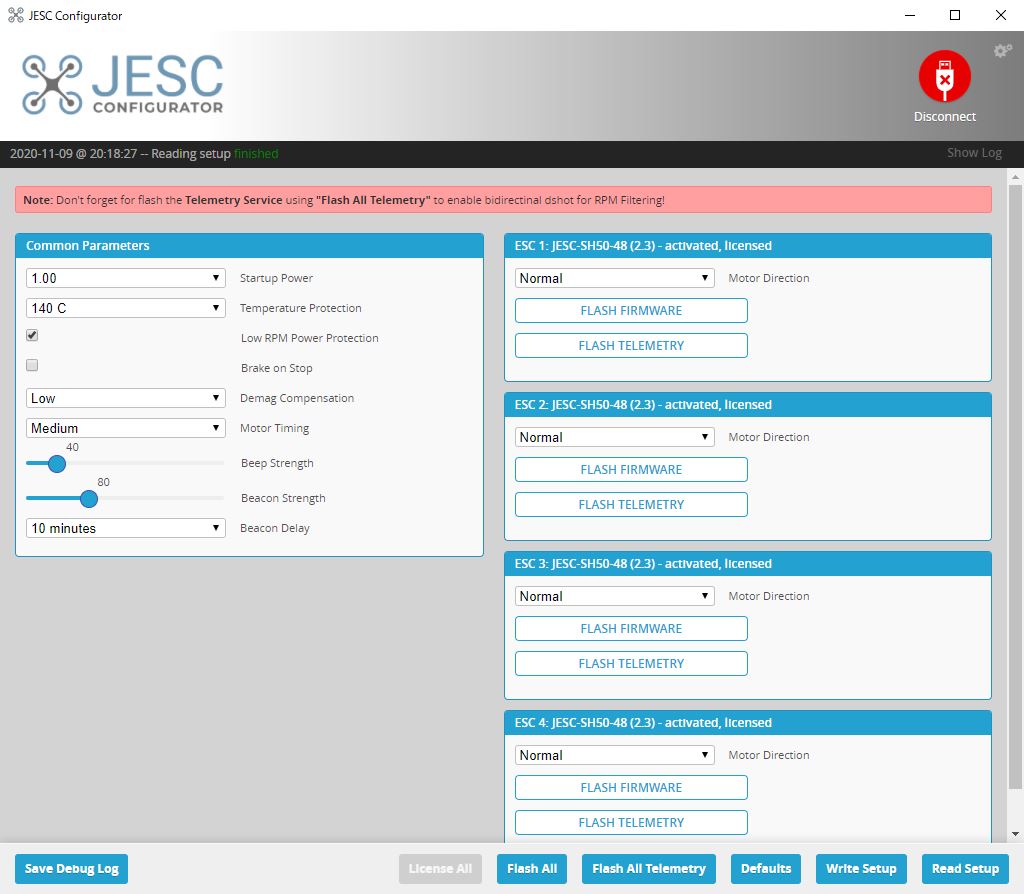
ESC1から順にESC4までが書き換えられます。じっと待つのみ。
警告出たままですが、ライセンスは activated, licensed になりました!
続いて、Flash ALL Telemetry を押します。
これまたよく分かりませんが、新しいヤツを選択しました。 Flash を押します。
書き込みが始まります。

警告も消えました!作業自体は上手く行ったようです。
Dshot Telemetryが使えるようです。
Disconnectして完了です。この時、本機から勝利のブザー音楽が鳴りました!
つづいて、
Betaflight Configuratorに接続します。バージョンは10.7.0(10.6.0以降必要)
ベータフライトのバージョンは 4.2.4です。(4.1.0以降必要)

なにもしない状態でのCPU負荷は、
![]()
7%程度でした。
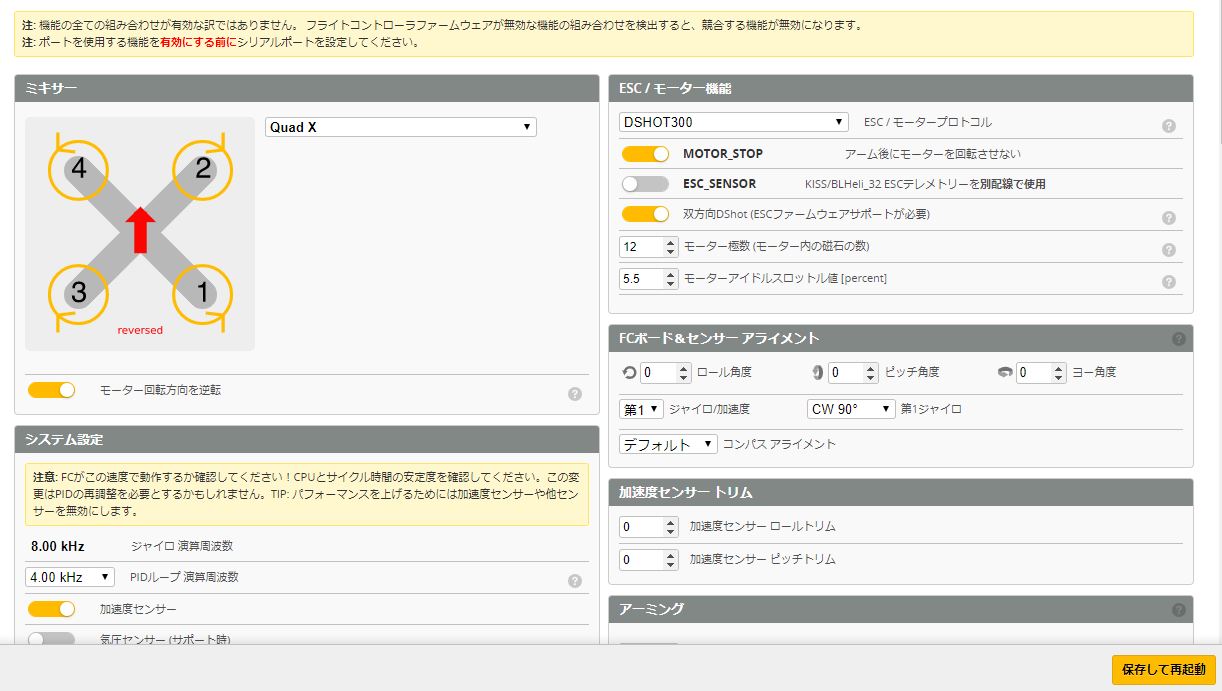
DSHOT300、双方向DShotをON、モーター極数は12、PIDループは4kHzとします。この状態でCPU負荷は、
![]() 13-14%と、2倍になりました。
13-14%と、2倍になりました。
ちなみに、DShot300→600 にしてもCPU負荷は1%も変わりませんでした。
ところが、Dshot300のままで、PIDループを4kHz→8kHzにすると、CPU負荷は60%超へ!ヤバいです。
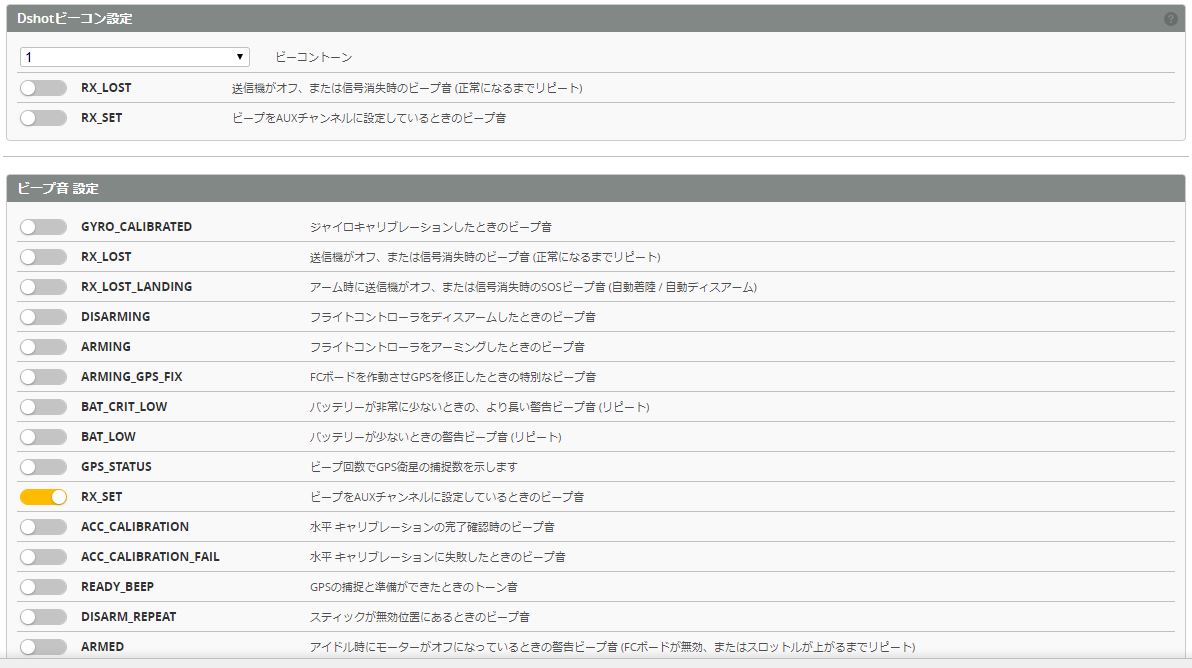
Trashcan75㎜はブザーがありません。モーターをブザーにように鳴らす機能がありますが、これを切りました。
ノイズとして何らかの調整が入ってもマズそうなので。
動的フィルターは、元の値がこれ。

変更した値が、

これ。
先人は、動的ノッチ幅 0、動的ノッチQ 250 とされています。
ビビりの私は、とりあえず2にしました。0だとモータの熱が上がるかも・・・と書いてあるからです。
モーター動作確認は、プロペラ外してやれ!とありますが、つけたままやってしまいました。ビビりなのに。
確かに、危なそうです。(今回は上手く行きました)
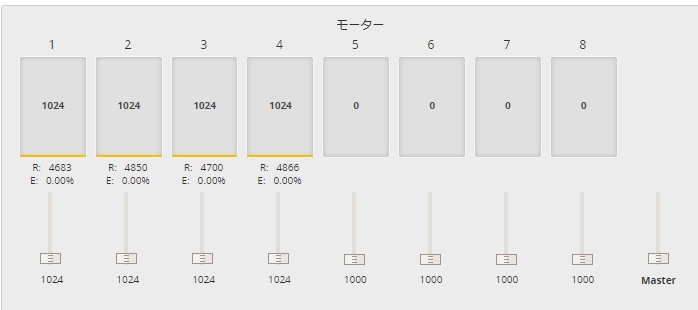
Masterスライダーをほんのちょっと上げて、Rの値が出ればOKだそうです。
052さんのブログに OSDにDshotのエラーを出すのがあったので設定してみました。
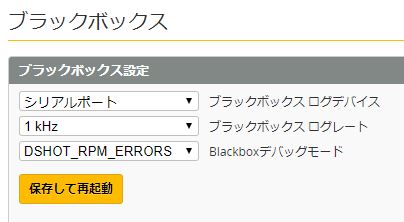
ブラックボックスでデバッグモードに上のように入れ、OSD設定で、デバッグにチェックを入れるだけ。

とりあえず、バッテリーを繋いで、1分程ホバリングしてみましたが、モーターが熱くなる感じはありません。
効果あるのかな?
あと、
DRONEマニアさんの情報も気になります。
それにしてみも、みなさんスゴイ!
少し飛ばしてみました。
”電池が劇的に持つぞー!”などということは無かった・・・(^^;)
少しマシかなぁ、という程度。悪くはなってない感じ。
カメラのブレも・・・少し小さくなったかな・・・良くなってる感じ。
デバッグモードは消しました。
48kHzで良かったのか・・・
ま、よく分かりませんが以前より良さそうです。
動画も作って見ました!