






Trashcan 75mm 第2弾!届きました!
2個目入手!・・・というキロク
Insta360GOを付けて飛ばしたら2日目でぶっ壊れたので即日発注しました😅
すると、わずか6日間で届くというスピード配送!スゴイぞAliexpress。
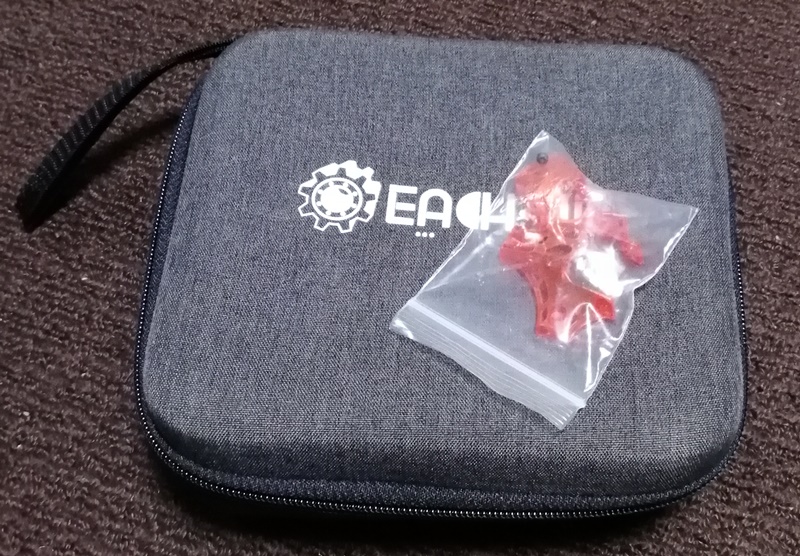 ケースが安っぽくなった気がします😅
ケースが安っぽくなった気がします😅
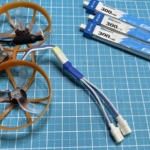
 中のクッションもかなりの手抜き・・・電池は相変わらず散乱してる。機体は変わらない感じだからいいか。
中のクッションもかなりの手抜き・・・電池は相変わらず散乱してる。機体は変わらない感じだからいいか。
早速設定してみます。
Betaflight configuratorに接続。
 BTFL 4.0.6 のようです。1号機と同じです。とりあえずバージョンアップはしません。
BTFL 4.0.6 のようです。1号機と同じです。とりあえずバージョンアップはしません。
まずバックアップを取りました(念のため)。
そしたら、ポートを確認。

VTXが設定されているのを見ただけ。触りません。
次に基本設定を確認。
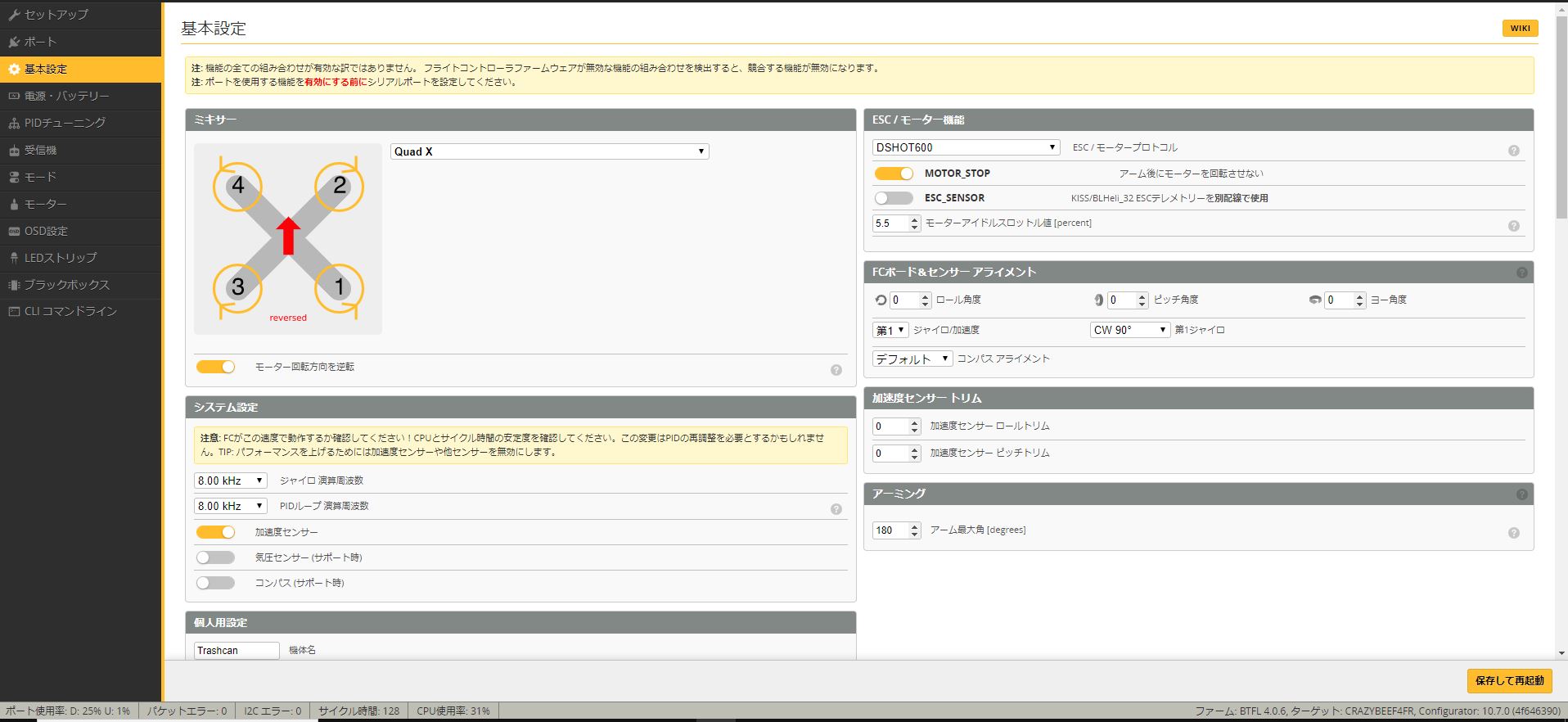
DSHOT600で、8kHz設定のFrskyX(D16)になっています。CPU使用率30%が気になります。
私の実力では到底必要なさそうなので、変更します。
DSHOT600、4kHz設定にし、カメラ角度も10度にしました。(現物がそのくらい)
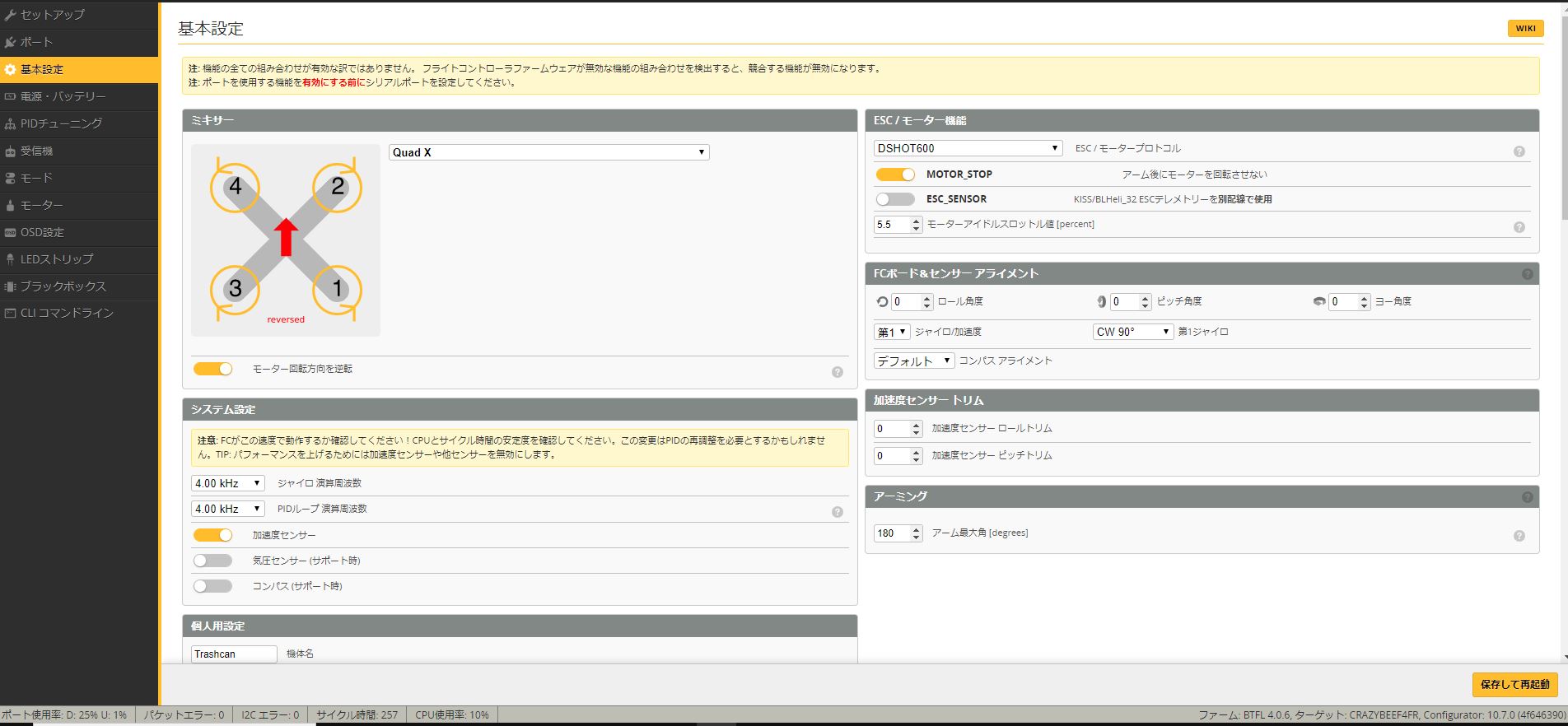
CPU使用率は約30%→10~13%になります!
他の設定は、元は次のだけど、
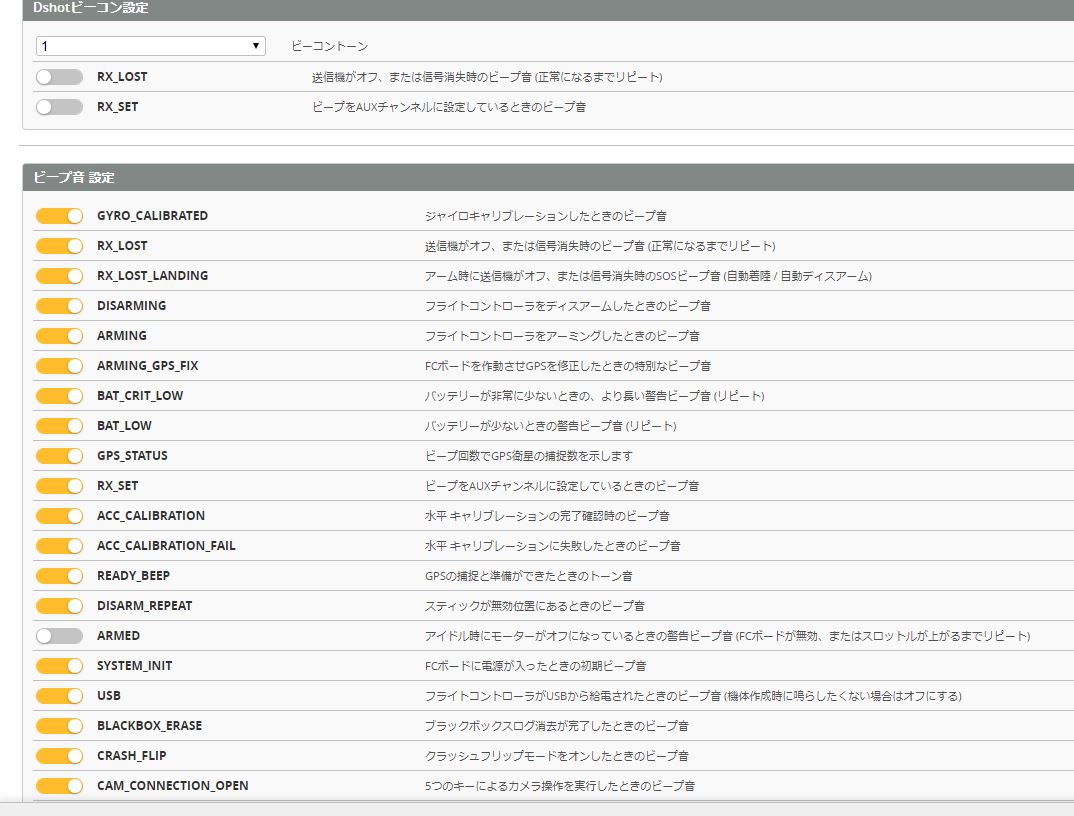
下のようにほぼOFFにします。


 保存して、電源へ。
保存して、電源へ。
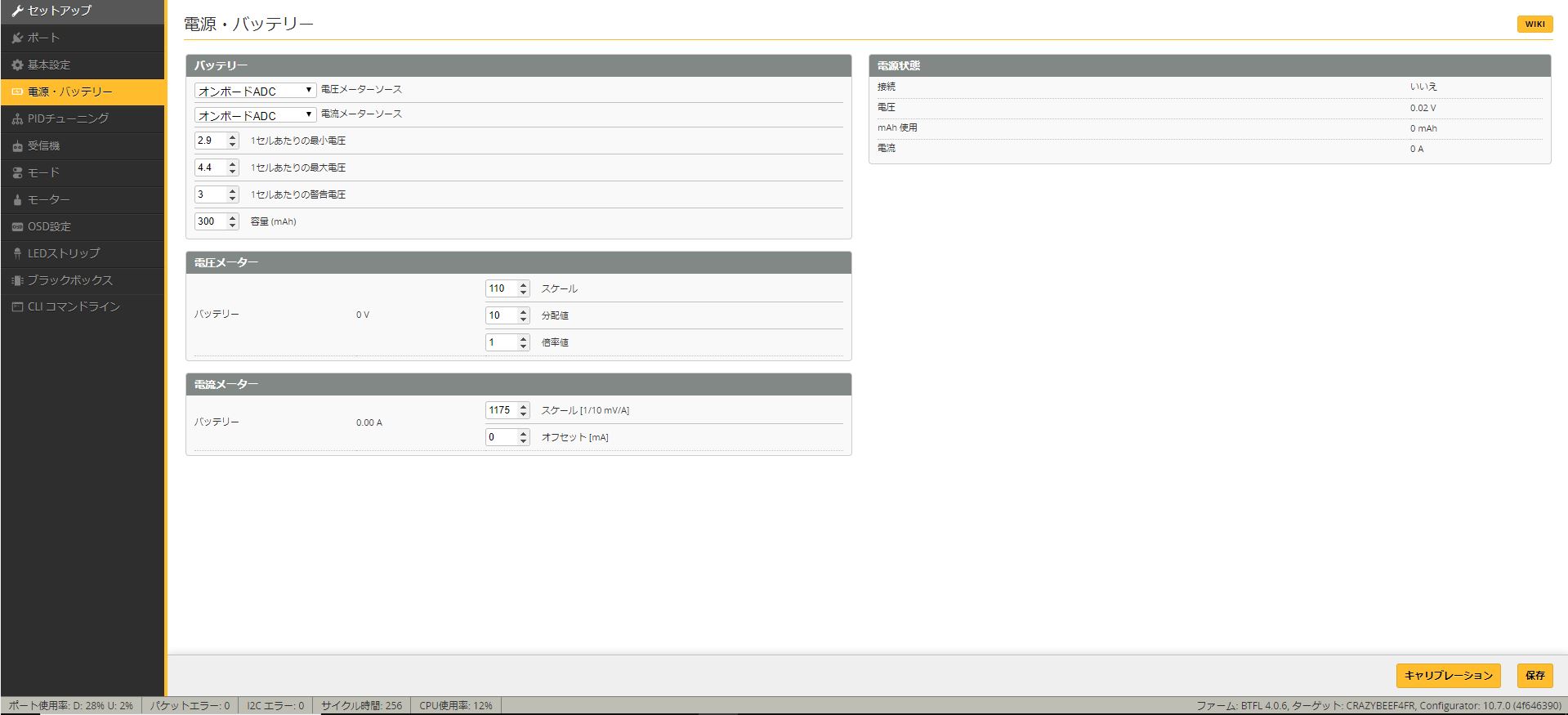
ここでは、容量に 300mA と入れただけ。
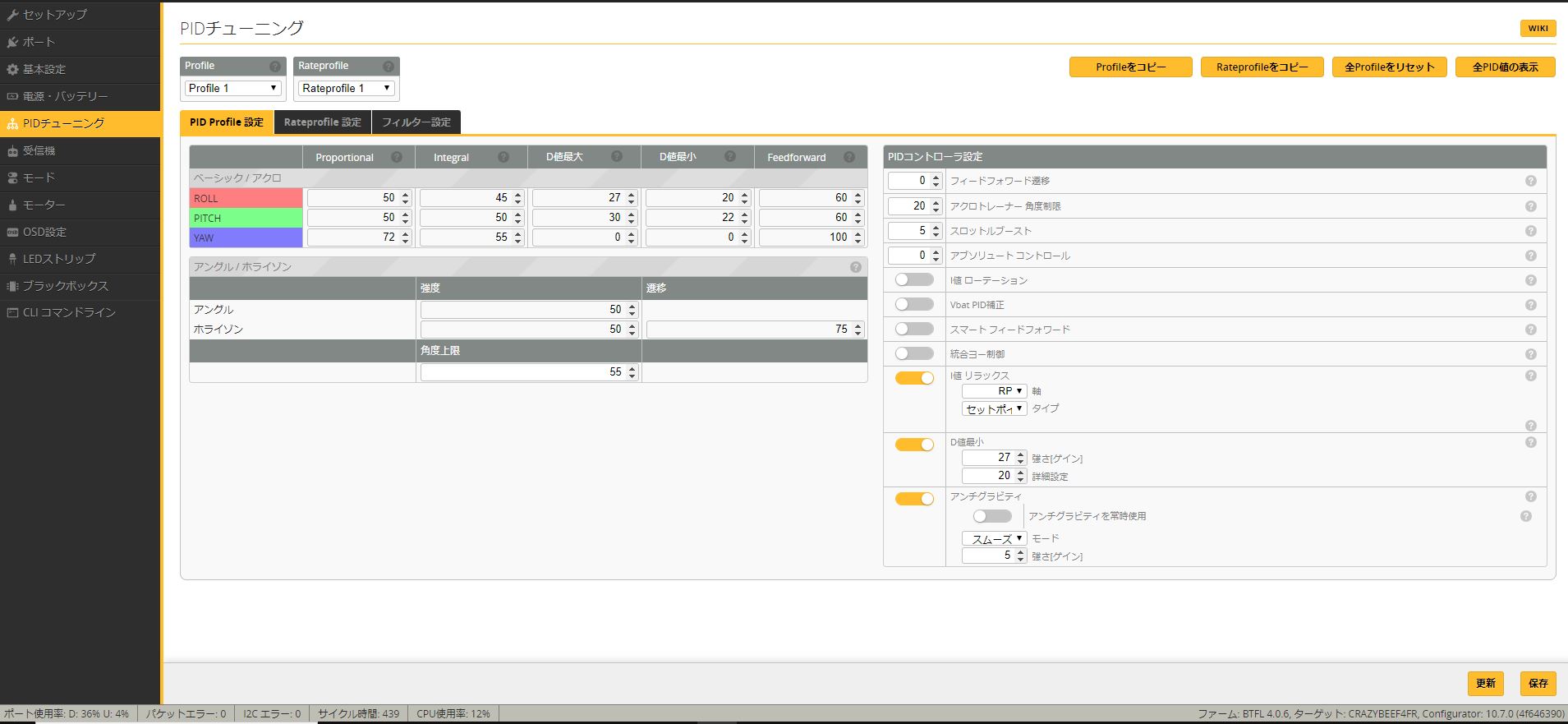
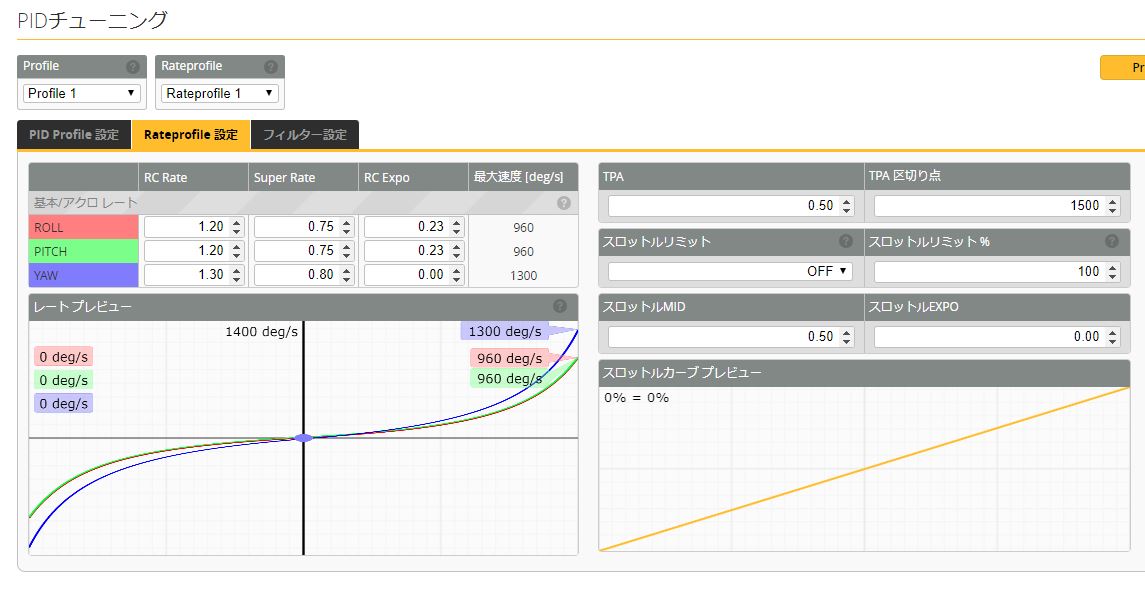
続いてPIDへ。デフォルトのままとしました。

なにもせずに、モードへ。
デフォルトは以下でした。

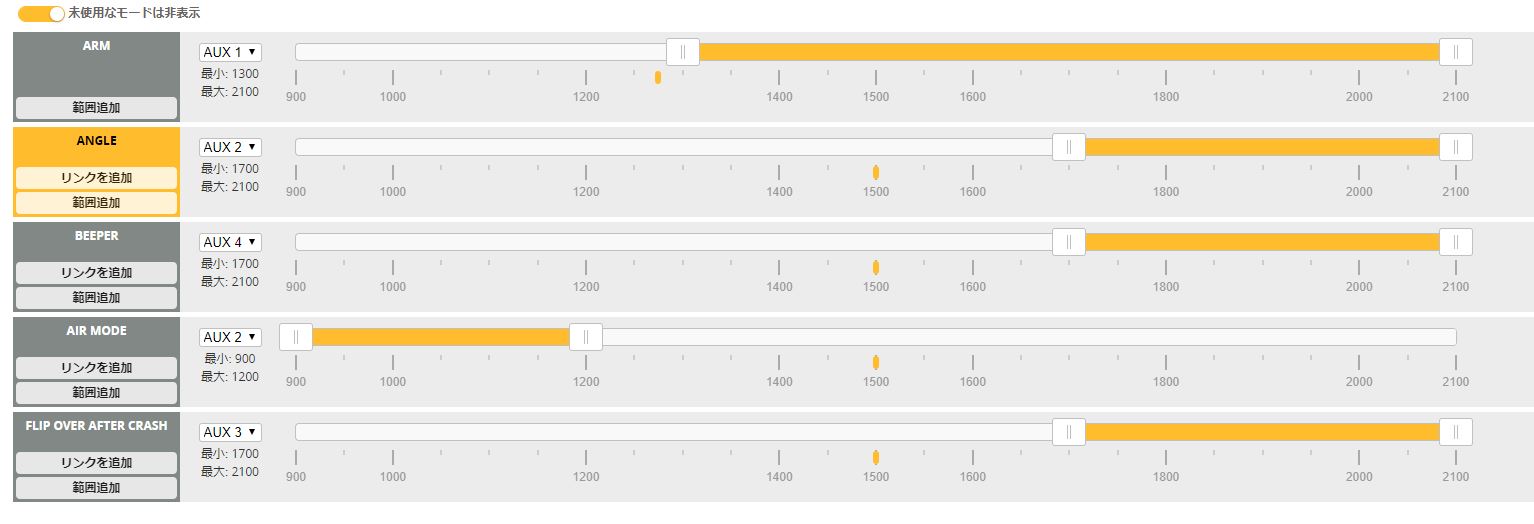
これを以下のように変更します。(設定は受け売りです)
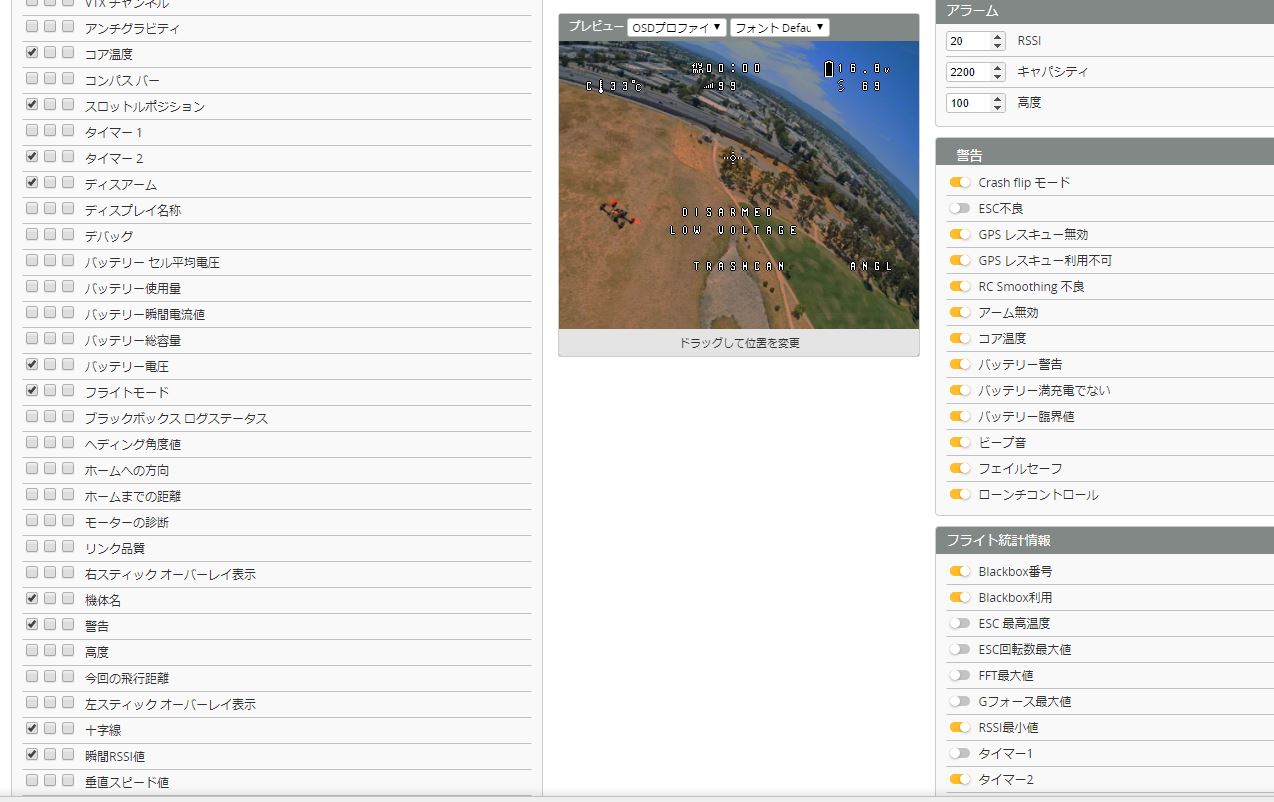
OSDはデフォルトでは、沢山チェックが入っていましたが、
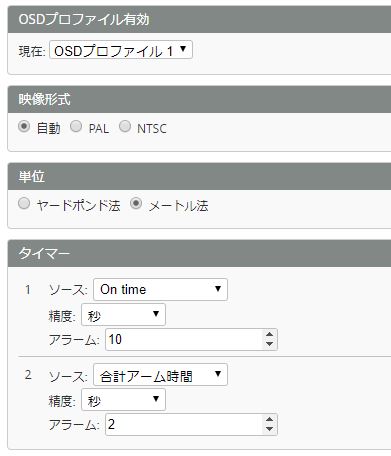 ソース2のアラームに2(分)を設定しただけ。チェックはとりあえず以下のように入れました。
ソース2のアラームに2(分)を設定しただけ。チェックはとりあえず以下のように入れました。
 そうしたら、
そうしたら、
CLIコマンドラインに行き、機体とプロポをバインドします。
プロポの設定は元のまま使いました。
bind_rx_spi とコマンドラインに入れ、プロポのBindを決行!うまく行ったようです。
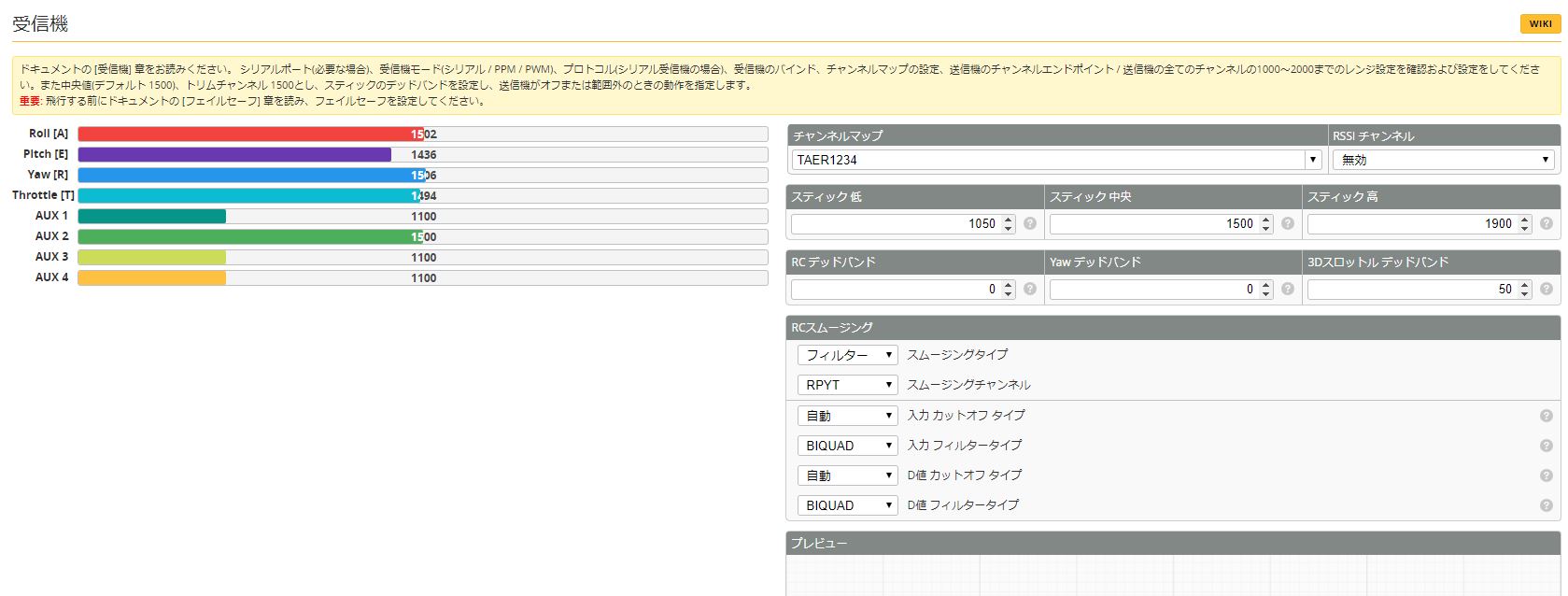
受信機に行き、確認します。
あらー、TAER1234になっていて、アニメーションがグルグル回ってる。プロポ側がAETR1234設定なのでしょうがない。
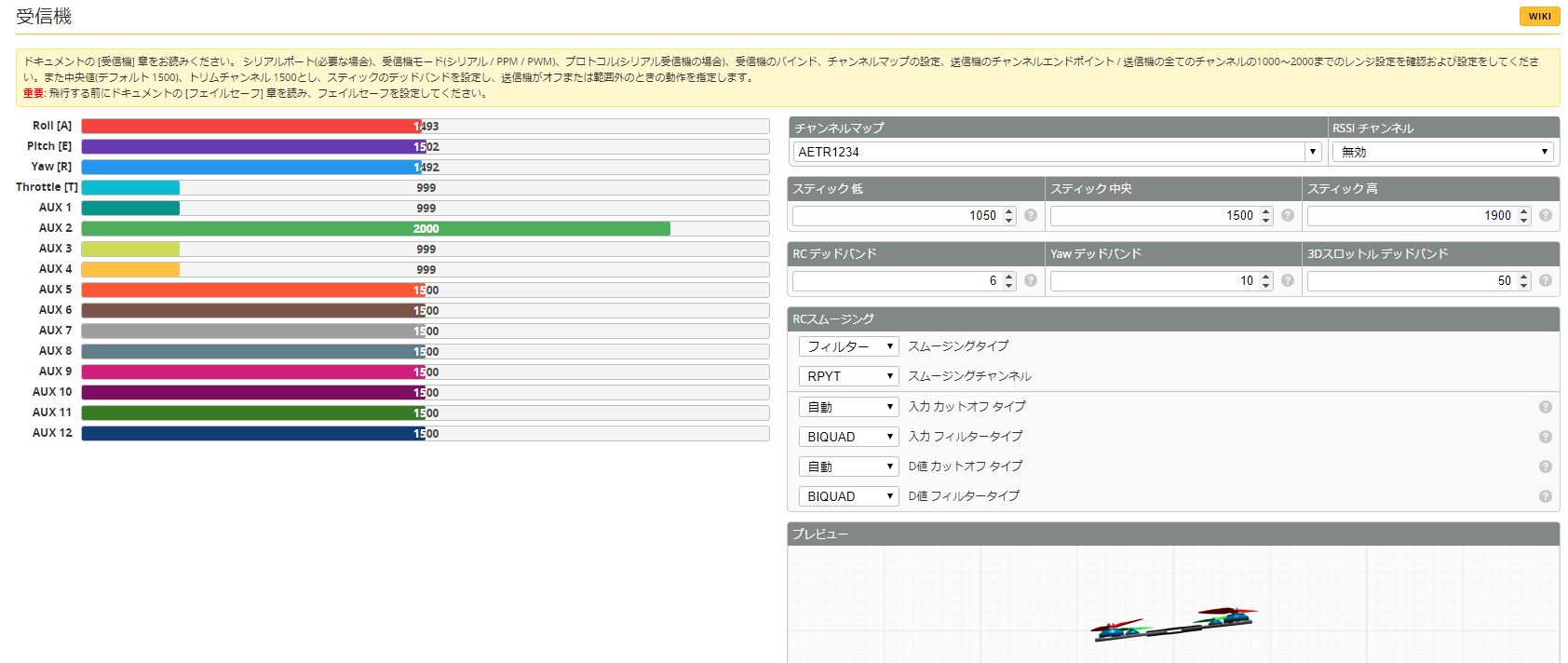
 ベータフライト側もAETRに変更して保存します。
ベータフライト側もAETRに変更して保存します。
私のプロポ(Jumper T8SG Plus V3)はショボいので、デッドバンドをRC,Yaw共に5~10位入れないとアニメーションの回転が止まりません。
LEDストリップはそのままで触りませんでした。
最後にCLIコマンドラインに行き、
Set vtx_band = 3
Set vtx_channel = 1
Set vtx_freq = 5705
を入力し、最後に save を入力します。
このあと念のため、設定を保存(dump all してから 名前を付けて保存)します。
ゴーグルに映ることも確認できました。
さすがに2個目だとスムーズ😄
と言いたいところですが、D8モード(Frsky)にしたらなぜか動きませんでした・・・
CALIB というメッセージがゴーグル上に出てアームできない・・・
調べてみると、
Sensor calibration is still ongoing
Wait for sensor calibration to complete.
しばし待て・・・ということですが、待ってもダメでした。
結局、FrskyX(D16)にしないとダメでした。理由不明です。
しかも1号機よりCALIBが終了するのに時間がかかる。5秒位待つ感じ。
とりあえず、動いて良かった・・・
新しくなったので、ブルブルは止まるはず。
たのしみだー!!
Trashcan 75mmのベータフライトをバージョンアップ!
Eachine TRASHCAN 75mm キター!
Trashcan 75mmに 双方向DSHOTを導入!
マイクロドローンを始めるには幾ら必要なのか?
マイクロドローン入門:BetaFlight Configrator インストール