







Trashcan 75mm 第2弾で早くも問題発生!!
やっぱりトラブル?!起きるねぇ・・・というキロク
トラブルは起きるもの!トホホ道を行くからねぇ。
まずは、Insta360GOを付けずに飛ばしたんだけど、
新しいTrashcan75mmを飛ばしたら早速問題が噴出!
(Insta360GO用のBKTは取付済み)

1.数分飛ばすだけで、モータがスゴク熱くなる。取付ネジが熱い!前側の2個だけなんだけど。
2.RXLOSSがすぐに出る。40m位離れると出る感じ。
3.画像のブレは・・・ブレる!1号機も最初からこんなんだったっけ?
そういえば・・・以前も似たようなことがあり、ファームウェアを更新したような・・・
B.T.F.L4.0.6 → 4.2.4
にしていました。今回は・・・やはり最新版でいくか!
まず、ImpulseRCを導入しDFUモードにします。TrashcanをPCと接続し、クロームとベータフライトは閉じておきます。
無事ドライバーが入ったら、BetaFlight Configuratorを起動します。グーグルクロームも起動して大丈夫。

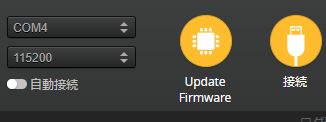
ベータフライトは起動時このようになっているはず。Update Firmwareを押します。

今現在は4.2.9にできるらしい・・・
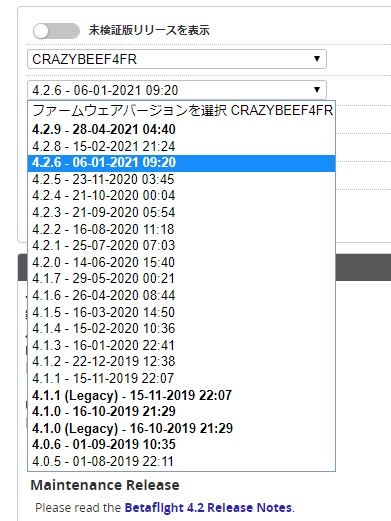
4.2.9は4/28更新で少し時間も経っているのでよさそうだろう。

ファームウェアを選択(Online)を押して、ファームウェアの更新を押します。
![]()
更新終了したら、

接続を押して
カスタム初期値を適用 すれば完了です。
ベータフライトはこうなります。接続すると、
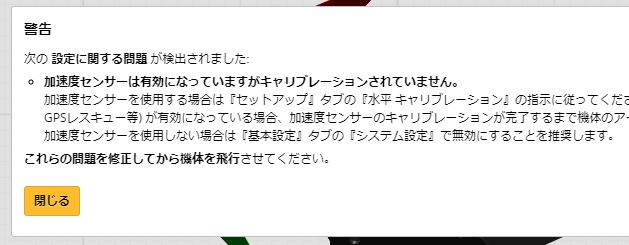
こんな警告が出ます。水平キャリブレーションが必要と言う意味です。

4.2.9
になりました!
再度Betaflight Configuratorで設定をやり直します。ポートから変わっているので注意必要。
以前のモノを記録してないと戻せません😅
PIDチューニングは今回の設定のままにします。こっちの方が初心者向き。
LEDストリップも設定して、見た目は元通り。
CPU使用率は11%位です。(DSHOT600、8kHz,4kHz設定)
飛ばしてみました!
うーん・・・
1.ネジ熱々→改善!良くなりました!
2.40m位でRXLOSS→50m位になった?・・・変わらないかも😅
3.ブレは大差ない感じ・・・残念
次は、RXを交換してみるかなぁ😴